��(d��ng)ǰλ�ã���� > �W(xu��)��(x��)�YԴ > �v������ > Ƕ��ʽҕ�Xϵ�y(t��ng)��Ŀ��(bi��o)��ۙ�㷨��Ӳ�������c����ƽ��

 Ƕ��ʽҕ�Xϵ�y(t��ng)��Ŀ��(bi��o)��ۙ�㷨��Ӳ�������c����ƽ��
�r(sh��)�g��2025-03-11 ��Դ���A���h(yu��n)Ҋ
Ƕ��ʽҕ�Xϵ�y(t��ng)��Ŀ��(bi��o)��ۙ�㷨��Ӳ�������c����ƽ��
�r(sh��)�g��2025-03-11 ��Դ���A���h(yu��n)Ҋ
����
�S��Ƕ��ʽϵ�y(t��ng)�ďV����(y��ng)�ã�Ƕ��ʽҕ�Xϵ�y(t��ng)�����ܱO(ji��n)�ء��Ԅ�(d��ng)�{�o�˙C(j��)���I(l��ng)���а�����Խ��Խ��Ҫ�Ľ�ɫ��Ŀ��(bi��o)��ۙ�㷨����Ƕ��ʽҕ�Xϵ�y(t��ng)�ĺ��ļ��g(sh��)֮һ��������ֱ��Ӱ푵�ϵ�y(t��ng)�Č�(sh��)�r(sh��)�Ժ͜�(zh��n)�_�ԡ�Ȼ����Ŀ��(bi��o)��ۙ�㷨ͨ��Ӌ(j��)���(f��)�s�ȸߣ����������Ӳ���YԴ��(sh��)�F(xi��n)�㷨��Ӳ�����٣�ͬ�r(sh��)�����^�ߵĸ�ۙ���ȣ���һ��(g��)ؽ����Q�Ć��}�����Č�̽ӑǶ��ʽҕ�Xϵ�y(t��ng)��Ŀ��(bi��o)��ۙ�㷨��Ӳ�������c����ƽ����ԡ�
�P(gu��n)�I�~����
1. Ƕ��ʽҕ�Xϵ�y(t��ng)
Ƕ��ʽҕ�Xϵ�y(t��ng)��ָ��Ӌ(j��)��C(j��)ҕ�X���g(sh��)��(y��ng)����Ƕ��ʽ�O(sh��)���У�ͨ�^�z���^�������������ɼ��D���ҕ�l��(sh��)��(j��)���������㷨�M(j��n)��̎���ͷ������Ԍ�(sh��)�F(xi��n)�ض��Ĺ��ܡ�Ƕ��ʽҕ�Xϵ�y(t��ng)ͨ�������YԴ���ޡ����ĵ͡���(sh��)�r(sh��)��Ҫ��ߵ����c(di��n)��
2. Ŀ��(bi��o)��ۙ�㷨
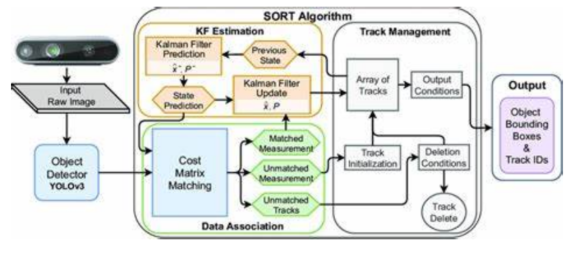
Ŀ��(bi��o)��ۙ�㷨��ָ��ҕ�l�����г��m(x��)��λ��ۙ�ض�Ŀ��(bi��o)�ļ��g(sh��)����Ҋ��Ŀ��(bi��o)��ۙ�㷨�����������V�������ӞV�������P(gu��n)�V������ȌW(xu��)��(x��)-based��ۙ�㷨�ȡ�Ŀ��(bi��o)��ۙ�㷨�ĺ����΄�(w��)����ÿһ���D�����A(y��)�yĿ��(bi��o)��λ�ú͠�B(t��i)��
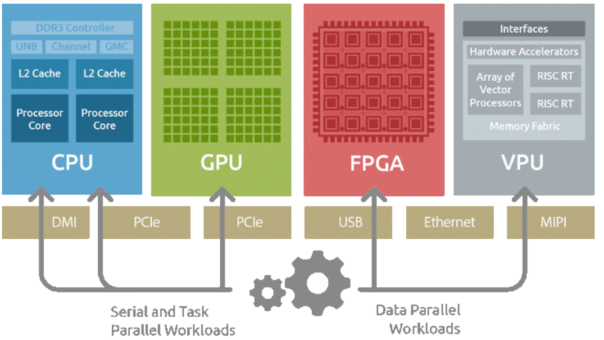
3. Ӳ������
Ӳ��������ָͨ�^����Ӳ������GPU��FPGA��ASIC�ȣ�������Ӌ(j��)���ܼ����΄�(w��)�Ĉ�(zh��)�С���Ƕ��ʽҕ�Xϵ�y(t��ng)�У�Ӳ�����ٿ����@�����Ŀ��(bi��o)��ۙ�㷨�Ĉ�(zh��)��Ч�ʣ��M�㌍(sh��)�r(sh��)��Ҫ��
4. ����ƽ��
����ƽ����ָ��Ӳ�������^���У�����ڱ��C�㷨���ȵ�ǰ���£�����ȵ����Ӌ(j��)��Ч�ʡ�����Ӳ������ͨ����(hu��)����һ����Ӌ(j��)���`������Ҫ�ھ��Ⱥ��ٶ�֮�g�ҵ�һ��(g��)ƽ���c(di��n)��
Ŀ��(bi��o)��ۙ�㷨��Ӳ�����ٲ���
1. ����FPGA��Ӳ������
FPGA���F(xi��n)���ɾ����T��У���һ�N���ؘ�(g��u)Ӳ�������в���Ӌ(j��)��������(qi��ng)�����ĵ͵����c(di��n)����Ƕ��ʽҕ�Xϵ�y(t��ng)�У�F(xi��n)PGA�������ڼ���Ŀ��(bi��o)��ۙ�㷨�е��P(gu��n)�IӋ(j��)�㲽�E������e�\(y��n)�㡢����\(y��n)��ȡ�
��(sh��)��������FPGA�����P(gu��n)�V����ۙ�㷨����
���P(gu��n)�V���㷨����KCF����Ŀ��(bi��o)��ۙ�г��õ��㷨֮һ�������Ӌ(j��)�㲽�E���l���(n��i)�ľ��e�\(y��n)�㡣ͨ�^�����e�\(y��n)��ӳ�䵽FPGA�ϣ������@�����Ӌ(j��)���ٶȡ����w��(sh��)�F(xi��n)���E���£�
1����ݔ��D���Ŀ��(bi��o)ģ���D(zhu��n)�Q���l��
2����FPGA�ϲ���Ӌ(j��)���l���(n��i)�ľ��e�\(y��n)�㡣
3�����Y(ji��)���D(zhu��n)�Q�ؕr(sh��)�õ�Ŀ��(bi��o)λ�á�
2. ����GPU��Ӳ������
GPU���D��̎���Ԫ�����Џ�(qi��ng)��IJ���Ӌ(j��)���������m��̎����Ҏ(gu��)ģ��(sh��)��(j��)�����΄�(w��)����Ƕ��ʽҕ�Xϵ�y(t��ng)�У�GPU�������ڼ�����ȌW(xu��)��(x��)-basedĿ��(bi��o)��ۙ�㷨��
��(sh��)��������GPU����ȌW(xu��)��(x��)��ۙ�㷨����
��ȌW(xu��)��(x��)-basedĿ��(bi��o)��ۙ�㷨����SiamFC��SiamRPN��ͨ����Ҫ�����ľ��e�\(y��n)�㡣ͨ�^�����e�ӡ��ػ��ӵ�Ӌ(j��)���ܼ��Ͳ���ӳ�䵽GPU�ϣ������@������㷨�Ĉ�(zh��)���ٶȡ����w��(sh��)�F(xi��n)���E���£�
1����ݔ��D���Ŀ��(bi��o)ģ��ݔ�뵽��ȌW(xu��)��(x��)ģ���С�
2����GPU�ϲ���Ӌ(j��)����e�ӡ��ػ��ӵȲ�����
3��ݔ��Ŀ��(bi��o)��λ�ú͠�B(t��i)��
����ƽ�����
1. �㷨��(y��u)��
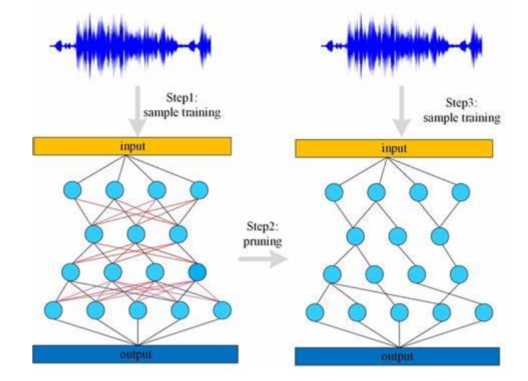
��Ӳ�������^���У�����ͨ�^�㷨��(y��u)����p��Ӌ(j��)���`���߸�ۙ���ȡ����磬����ȌW(xu��)��(x��)-based��ۙ�㷨�У�����ͨ�^ģ�ͼ�֦�������ȼ��g(sh��)�p��ģ�͵�Ӌ(j��)���(f��)�s�ȣ�ͬ�r(sh��)�����^�ߵĸ�ۙ���ȡ�
��(sh��)����ģ�ͼ�֦�c����
ģ�ͼ�֦��ָͨ�^ȥ����(j��ng)�W(w��ng)�j(lu��)�в���Ҫ�ę�(qu��n)�ػ���(j��ng)Ԫ���p��ģ�͵�Ӌ(j��)������������ָ�����c(di��n)��(sh��)�D(zhu��n)�Q�鶨�c(di��n)��(sh��)���p��Ӌ(j��)�㾫�ȓpʧ��ͨ�^�Y(ji��)��ģ�ͼ�֦�������������ڱ��C��ۙ���ȵ�ǰ���£��@������㷨�Ĉ�(zh��)��Ч�ʡ�
2. Ӳ��-ܛ���f(xi��)ͬ�O(sh��)Ӌ(j��)
Ӳ��-ܛ���f(xi��)ͬ�O(sh��)Ӌ(j��)��ָ���O(sh��)Ӌ(j��)Ƕ��ʽҕ�Xϵ�y(t��ng)�r(sh��)���C�Ͽ��]Ӳ����ܛ�������ԣ���(y��u)��ϵ�y(t��ng)�����w���ܡ����磬����ͨ�^Ӳ���������cܛ���㷨�ąf(xi��)ͬ�O(sh��)Ӌ(j��)����(sh��)�F(xi��n)�����c�ٶȵ�ƽ�⡣
��(sh��)����Ӳ��-ܛ���f(xi��)ͬ�O(sh��)Ӌ(j��)��Ŀ��(bi��o)��ۙϵ�y(t��ng)
��Ŀ��(bi��o)��ۙϵ�y(t��ng)�У����Ԍ�Ӌ(j��)���ܼ��͵ľ��e�\(y��n)��ӳ�䵽FPGA��GPU�ϣ���������Ӌ(j��)�㲽�E����Ŀ��(bi��o)�z�y����B(t��i)���µȣ�������CPU�ψ�(zh��)�С�ͨ�^�������΄�(w��)���䣬�����ڱ��C��ۙ���ȵ�ǰ���£�����ȵ����ϵ�y(t��ng)�Č�(sh��)�r(sh��)�ԡ�
�Y(ji��)Փ
��Ƕ��ʽҕ�Xϵ�y(t��ng)�У�Ŀ��(bi��o)��ۙ�㷨��Ӳ�������c����ƽ����һ��(g��)��(f��)�s����Ҫ�Ć��}��ͨ�^����FPGA��GPU��Ӳ�����ٲ��ԣ��Y(ji��)���㷨��(y��u)����Ӳ��-ܛ���f(xi��)ͬ�O(sh��)Ӌ(j��)������������Ӳ���YԴ��(sh��)�F(xi��n)��Ч��Ŀ��(bi��o)��ۙ��ͬ�r(sh��)�����^�ߵĸ�ۙ���ȡ�δ�����S��Ӳ�����g(sh��)�IJ����M(j��n)�����㷨�ij��m(x��)��(y��u)����Ƕ��ʽҕ�Xϵ�y(t��ng)��Ŀ��(bi��o)��ۙ�I(l��ng)��đ�(y��ng)��ǰ�������ӏV韡�
 �n�̷������A���h(yu��n)Ҋ(li��n)��NXP�Ƴ�i.MX8M Plus�_�l(f��)�c��(sh��)�`�n�̷���������HarmonyOSϵ�y(t��ng)����(li��n)�W(w��ng)�_�l(f��)��(sh��)��(zh��n)�n�̣��n�̷�����HaaS EDU K1�_�l(f��)�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ(z��ng)�ͣ�Ƕ��ʽ���r(ji��)ֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M(f��i)�ͣ����㶮Ƕ���r(ji��)ֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�(sh��)䛾��A��ҕ�l���M(f��i)�I(l��ng)ȡ����(n��i)��Դ��Ƕ��ʽ Linux ϵ�y(t��ng)�ă�(n��i)�˰�ȫ�ӹ̼��g(sh��)�c��(sh��)�`��Ƕ��ʽҕ�Xϵ�y(t��ng)��Ŀ��(bi��o)��ۙ�㷨��Ӳ�������c����ƽ�����څ^(q��)�K朵�Ƕ��ʽ�O(sh��)�������J(r��n)�C�c��(sh��)��(j��)��ȫ��ݔ�����˹������㷨�������t(y��)�W(xu��)�D��ָ��е���������������ARM�ܘ�(g��u)��Ƕ��ʽϵ�y(t��ng)����(d��ng)�����������Ƕ��ʽϵ�y(t��ng)�Ќ�(sh��)�r(sh��)��(sh��)��(j��)��Ĵ惦(ch��)�Y(ji��)��(g��u)�c�L��Ч���о�����Transformer�ܘ�(g��u)�ĕr(sh��)�g�����A(y��)�yģ�̓�(y��u)���о����ďV��W(w��ng)��LPWAN�����g(sh��)����(li��n)�W(w��ng)��Ҏ(gu��)ģ�����еČ�(sh��)����Ծ��a���ڸ߾S��(sh��)��(j��)���S�c������ȡ�е������u(p��ng)����Ƕ��ʽ��������(ji��)�c(di��n)�������ɼ��������g(sh��)��(chu��ng)��
�n�̷������A���h(yu��n)Ҋ(li��n)��NXP�Ƴ�i.MX8M Plus�_�l(f��)�c��(sh��)�`�n�̷���������HarmonyOSϵ�y(t��ng)����(li��n)�W(w��ng)�_�l(f��)��(sh��)��(zh��n)�n�̣��n�̷�����HaaS EDU K1�_�l(f��)�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ(z��ng)�ͣ�Ƕ��ʽ���r(ji��)ֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M(f��i)�ͣ����㶮Ƕ���r(ji��)ֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�(sh��)䛾��A��ҕ�l���M(f��i)�I(l��ng)ȡ����(n��i)��Դ��Ƕ��ʽ Linux ϵ�y(t��ng)�ă�(n��i)�˰�ȫ�ӹ̼��g(sh��)�c��(sh��)�`��Ƕ��ʽҕ�Xϵ�y(t��ng)��Ŀ��(bi��o)��ۙ�㷨��Ӳ�������c����ƽ�����څ^(q��)�K朵�Ƕ��ʽ�O(sh��)�������J(r��n)�C�c��(sh��)��(j��)��ȫ��ݔ�����˹������㷨�������t(y��)�W(xu��)�D��ָ��е���������������ARM�ܘ�(g��u)��Ƕ��ʽϵ�y(t��ng)����(d��ng)�����������Ƕ��ʽϵ�y(t��ng)�Ќ�(sh��)�r(sh��)��(sh��)��(j��)��Ĵ惦(ch��)�Y(ji��)��(g��u)�c�L��Ч���о�����Transformer�ܘ�(g��u)�ĕr(sh��)�g�����A(y��)�yģ�̓�(y��u)���о����ďV��W(w��ng)��LPWAN�����g(sh��)����(li��n)�W(w��ng)��Ҏ(gu��)ģ�����еČ�(sh��)����Ծ��a���ڸ߾S��(sh��)��(j��)���S�c������ȡ�е������u(p��ng)����Ƕ��ʽ��������(ji��)�c(di��n)�������ɼ��������g(sh��)��(chu��ng)��

