
 ���̎����Y������CAN�����e�`��ԭ��
�r�g��2024-09-02 ��Դ���A���hҊ
���̎����Y������CAN�����e�`��ԭ��
�r�g��2024-09-02 ��Դ���A���hҊ
CAN������Controller Area Network������һ�N�V����������܇��ӡ����I�Ԅӻ����t���O����I���ͨ�Ņf�h�������Ч���ɿ���ͨ���������Q��Ȼ�����M��CAN�����Ŀɿ��Ժܸߣ��ڌ��H�����У��e�`����Ȼ���ܰl�������Č�̽ӑ���̎������Y������CAN�e�`��ԭ�������ڌ��H�_�l���{ԇ�^���и��õ�����ͽ�Q�@Щ���}��
1. ����ӆ��}
1.1 �Ӿ����}
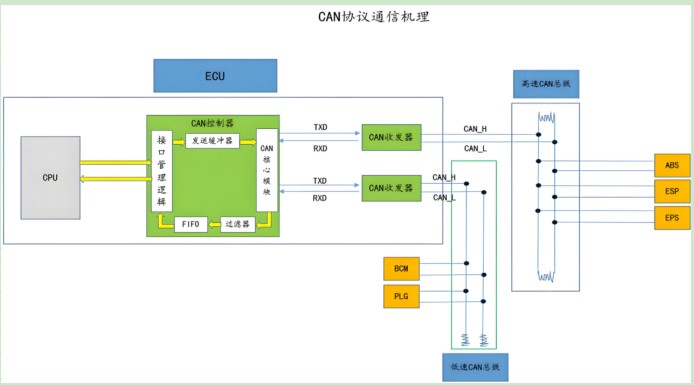
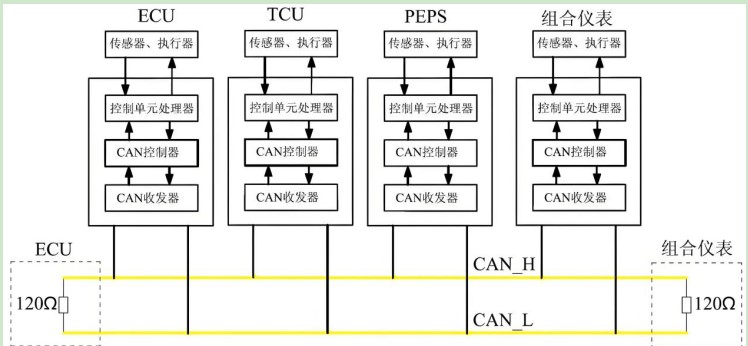
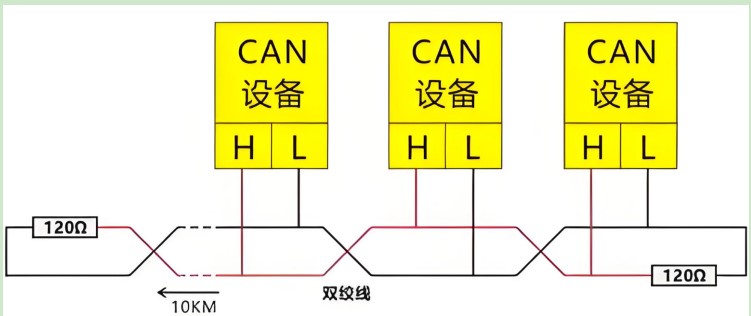
CAN�����������ͨ���Ƀɸ���̖����CAN_H��CAN_L�����ɡ��@�ɗl��Ҫ�����һ���IJ���迹��ͨ����120�Wķ���������ڃɶ˸���һ���K����衣����Ӿ�����������K�����δ���_���롢�Ӿ��^�L����̖��֮�g�ľ��x�����ȣ�����������̖����͓p�ģ��M�����l�e�`����
1.2 �ӵز���
CAN���c֮�g�ӵز����������ƽ���ʹ�ò����̖ʧ�棬�M��Ӱ�ͨ�ŵķ����ԡ��e���ڹ��I�h���У��L���x���cͨ���У��ӵ؆��}�Ȟ���Ҫ���ӵز�������������ܕ��ɔ_CAN����������ͨ�ţ������e�`���Įa����
2.�����������e�`
��ͬ���c֮�g��CAN��������Ҫ��ȫһ�£���t�����o��ͬ�����@ͨ�������lһϵ�І��}�������e�`���Įa�������{ԇ��S�o�У���횴_�����й��c�IJ�����������ͬ�������ϵ�y������S�o���`�O�˲�ͬ�IJ����ʣ����ܕ�����ͨ���Д࣬�����y�Կ��ٰl�F���}�ĸ�Դ��
3. Ӳ������
3.1 оƬ����
CAN������оƬ�����·�Ĺ���Ҳ�������l�e�`�������磬оƬ�Ȳ��IJ����̖�Ŵ����p�Ŀ��ܕ�������̖��ݔ���������mȻоƬ����������Ҋ������һЩ�O�˵Ĺ����h���У��L�r�g�ĸߜػ��^늉����ܕ�����оƬ��uʧЧ��
3.2 ���c����
CAN������һ����cϵ�y���������һ�����cӲ���l�����ϣ����翂����·���_·��������^�ߣ�����Ӱ������W�j��ͨ�ţ��a�������e�`�����@�N��r�ڶ�cϵ�y���Ȟ鳣Ҋ����Ҫ�����c�M����һ�Ų顣
4. 늴Ÿɔ_��EMI��
늴Ÿɔ_��CAN������Ҋ�Ć��}֮һ���e���ڹ��I�h���У���늴ň�����l�_�P�·����CAN�����a���ɔ_��������̖��׃��Gʧ����K���l�e�`�������˜p��EMI��Ӱ푣����Բ�ȡ������|�������ӵغ͞V���ȴ�ʩ��
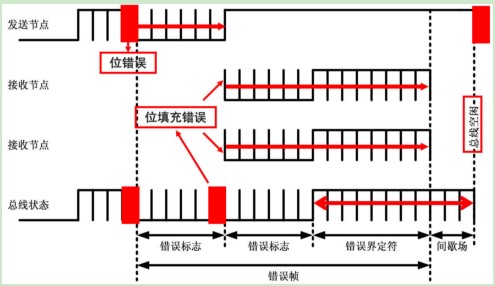
5. �f�h���e�`
ܛ��������e�`ͬ�ӕ�����CAN�e�`���Įa�������磬�ھ���CANͨ�Ņf�h���r�������CAN�����������ò��������^�V���O���e�`��ͨ��ģʽ������ģʽ��ֻ�O ģʽ���x���e�`�ȣ��������lͨ�Ź��ϣ��M���a���e�`�����{ԇ�^���У����̎���Ҫ���f�h���M��ȫ��z�飬�_�����ßo�`��
6. ���d����Overload Frame��
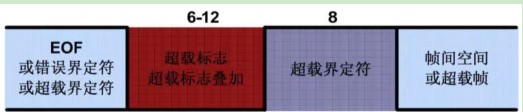
��CAN�������o��̎�����յ��Ď��r�������l��һ�����d����Overload Frame����֪ͨ�������c���rֹͣ�l�͔��������d���^����ܕ�Ӱ푿����Č��r�ԣ��M���������Gʧ���e�`���ij��F���@�N��r��l���ڿ���ؓ�d�^�������̎�������������r�¡�
���Y
CAN�����e�`���Įa��ԭ���N���ӣ����w�ˏ�����ӡ�Ӳ����ܛ���ĸ������档���{ԇ���_�l�^���У����̎���Ҫȫ�濼�]�@Щ���أ�������Ч���Ų�ͽ�Q���}��ͨ�^�������OӋ������Ĝyԇ�Լ����µ��{ԇ����������ȵp���e�`���Įa�����_��CAN�����ķ����ԺͿɿ��ԡ�
 �n�̷������A���hҊ��NXP�Ƴ�i.MX8M Plus�_�l�c���`�n�̷���������HarmonyOSϵ�y�����W�_�l�����n�̣��n�̷�����HaaS EDU K1�_�l�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ�ͣ�Ƕ��ʽ���rֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M�ͣ����㶮Ƕ���rֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�䛾��A��ҕ�l���M�Iȡ���Ⱥ�Դ������ÙC���W���������Ի����]ϵ�yǶ��ʽϵ�y����늵�����ϵ�y�\�е�����������������ڲ�ͬ������������Ƕ��ʽϵ�y���Դ����Ӳ������ӣ�HAL�����OӋ�����ߴ��a�Ŀ���ֲ�������wһ������ȌW��Ӗ���е����ú͌��F�������W�Ŀ���OӋǶ��ʽϵ�y�r���P�I���g�Ϳ��]����ͨ�^��Ȼ�Z��̎�����g�����ı�����Ӻ��x��λ���RISC-V�ܘ��OӋ��Ч�ܵ�Ƕ��ʽϵ�yLSTM��GRU�ڕr�g�����A�y�еđ���JTAG��SWD���{ԇ���g������
�n�̷������A���hҊ��NXP�Ƴ�i.MX8M Plus�_�l�c���`�n�̷���������HarmonyOSϵ�y�����W�_�l�����n�̣��n�̷�����HaaS EDU K1�_�l�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ�ͣ�Ƕ��ʽ���rֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M�ͣ����㶮Ƕ���rֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�䛾��A��ҕ�l���M�Iȡ���Ⱥ�Դ������ÙC���W���������Ի����]ϵ�yǶ��ʽϵ�y����늵�����ϵ�y�\�е�����������������ڲ�ͬ������������Ƕ��ʽϵ�y���Դ����Ӳ������ӣ�HAL�����OӋ�����ߴ��a�Ŀ���ֲ�������wһ������ȌW��Ӗ���е����ú͌��F�������W�Ŀ���OӋǶ��ʽϵ�y�r���P�I���g�Ϳ��]����ͨ�^��Ȼ�Z��̎�����g�����ı�����Ӻ��x��λ���RISC-V�ܘ��OӋ��Ч�ܵ�Ƕ��ʽϵ�yLSTM��GRU�ڕr�g�����A�y�еđ���JTAG��SWD���{ԇ���g������

