
�����y���
�r�g��2018-03-26���ߣ��A���hҊ
������һ���Fԓ������Ӳ��ƽ�_��STM32F103RCT6+HC-SR04�����y��ģ�K��
1.���È��� ����������С܇�y����Լ��r�l�Fǰ�����ϵK�ʹ����С܇���Լ��r�D���_�ϵK� 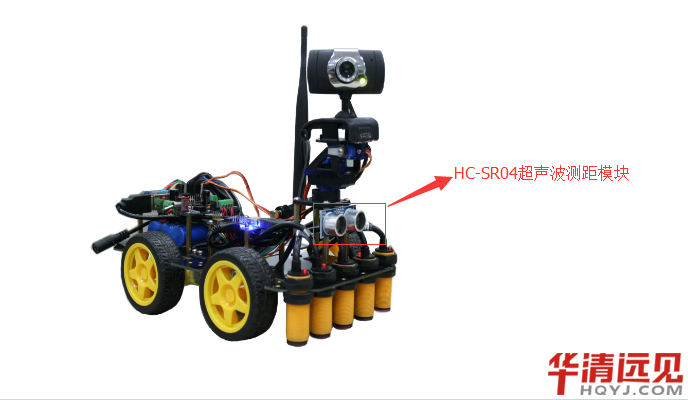
2.HC-SR04�����y��ģ�K��ʹ���f��
2.1 HC-SR04�����y��ĵĻ�������
�D1 HC-SR04�����y��ģ�K�ĮaƷ��B
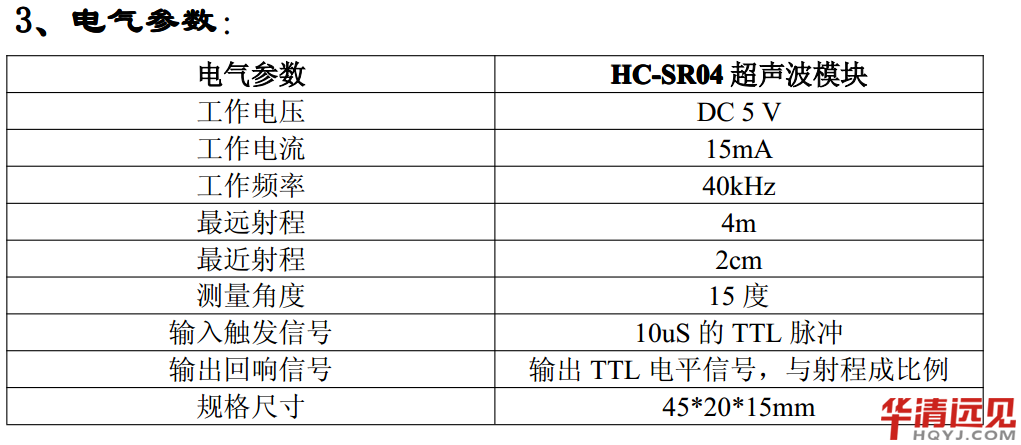
�D2 HC-SR04�����y��ģ�K��늚Ⅲ��
���ψDƬ��ij���ṩ��ģ�K�f�������ݣ����ڌ��H�{ԇ�^���аl�F��Щ���������f���������ṩ�ą���߀���в�e�ģ���Ҫ�w�F���@�ɷ��棺1.HC-SR04�����y��ģ�K�����y��ֻ��3�࣬�_����4m����С�y�����3cm�͜y������2.ԓ����ģ�K�Ĺ��늉�������3.3V��3.3V��늣�ԓģ�KҲ������������2.2HC-SR04�����y��Ĺ���ԭ�� 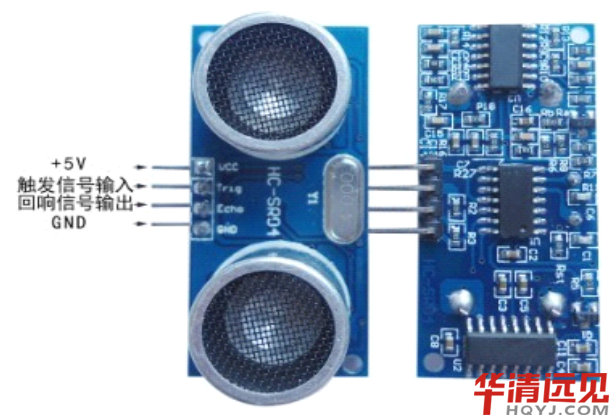
�D3�����y��ģ�K�Č���D
�҂��ĈD�����Կ���ԓ�����y��ģ�K������4�����_���քe��VCC,TRIG,ECHO,GND�@�Ă����_������VCC-GND��ԓģ�K���Դ���_��TRIG���_���|�l��̖ݔ�룬ECHO������̖ݔ������Ҫ�҂����Ƶ���TRIG��ECHO�@�ɂ����_��
�D4 HC-SR04�����y��ģ�K�Ļ�������ԭ��
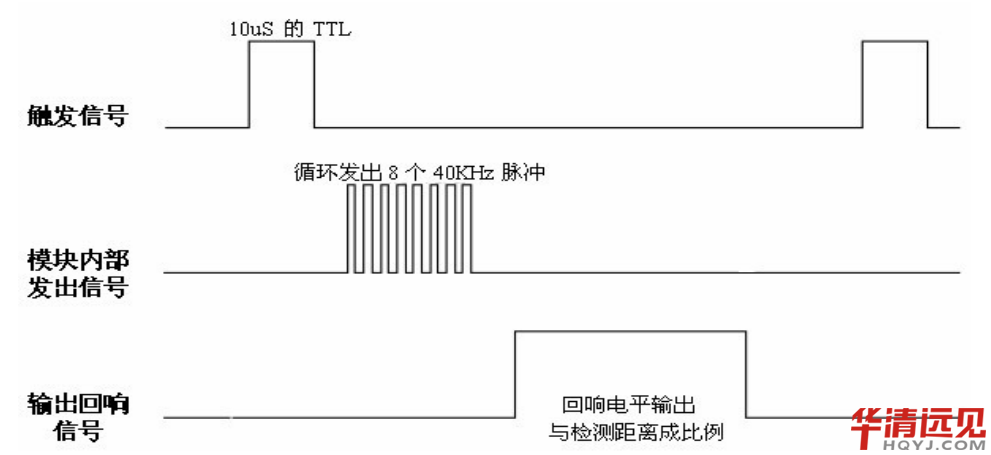
�D5 HC-SR04�y��ģ�K�Ļ����r��
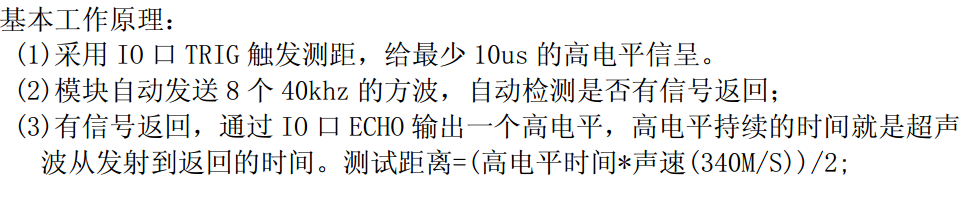
�����D4�͈D5�҂����Ժ�������֪��HC-SR04�Ĺ���ԭ����1.�o����ģ�K��늣��@����ʹ�õ�3.3V��늡� 2..�oTRIG���_���|�l��̖ݔ�룩һ�����ٳ��m10us�ĸ��ƽ��̖���|�l�@��ģ�K�_ʼ�M�Мy�࣬�@�����x��ͨ�^STM32��GPIO�ڽoTRIG�@�����_һ�����m20us�ĸ��ƽ��̖�� 3.HC-SR04�����y��ģ�K��TRIG���_���ܵ��@���|�l�y����̖��ģ�K���ԄӰl���8��40Khz�ķ���������ͬ�rECHO���_�������̖ݔ�������Ԅ���0׃��1,�@����ʹ��STM32��GPIO������ݔ��z�y��ECHO���_����ƽ�r�t�_�����r���_ʼӋ���� 4.���������ܵ��y�����̖��ECHO���_���Ԅ���1׃��0��STM32�z�y��ECHO���_���½��خa���r�����r���tֹͣӋ�������r��ӛ�µĕr�g���dz����İl�䵽���صĿ��r�L�� 5.���xӋ�㹫ʽ��ECHO���ƽ�ij��m�r�g*�٣�340M/S��/2=���x 3.Ӳ���B�� VCC---------->3.3V GND---------->GND TRIG--------->PB5 ECHO--------->PB6 4.ܛ�����F
1. //�����y��
2. 3. #include "hcsr04.h" 4. 5. #define HCSR04_PORT GPIOB 6. #define HCSR04_CLK RCC_APB2Periph_GPIOB 7. #define HCSR04_TRIG GPIO_Pin_5 8. #define HCSR04_ECHO GPIO_Pin_6 9. 10. #define TRIG_Send PBout(5) 11. #define ECHO_Reci PBin(6) 12. 13. u16 msHcCount = 0;//msӋ�� 14. 15. void Hcsr04Init() 16. { 17. TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //�������ڶ��r���O�õĽY���w 18. GPIO_InitTypeDef GPIO_InitStructure; 19. RCC_APB2PeriphClockCmd(HCSR04_CLK, ENABLE); 20. 21. //IO��ʼ�� 22. GPIO_InitStructure.GPIO_Pin =HCSR04_TRIG; //�l���ƽ���_ 23. GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 24. GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//����ݔ�� 25. GPIO_Init(HCSR04_PORT, &GPIO_InitStructure); 26. GPIO_ResetBits(HCSR04_PORT,HCSR04_TRIG); 27. 28. GPIO_InitStructure.GPIO_Pin = HCSR04_ECHO; //�����ƽ���_ 29. GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//����ݔ�� 30. GPIO_Init(HCSR04_PORT, &GPIO_InitStructure); 31. GPIO_ResetBits(HCSR04_PORT,HCSR04_ECHO); 32. 33. //���r����ʼ�� ʹ�û������r��TIM6 34. RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM6, ENABLE); //ʹ�܌���RCC�r� 35. //���ö��r�����A�Y���w 36. TIM_DeInit(TIM2); 37. TIM_TimeBaseStructure.TIM_Period = (1000-1); //�O������һ�������¼��b���ӵ��Ԅ����b�d�Ĵ������ڵ�ֵ Ӌ����1000��1ms 38. TIM_TimeBaseStructure.TIM_Prescaler =(72-1); //�O���Á�����TIMx�r��l�ʳ������A���lֵ 1M��Ӌ���l�� 1USӋ�� 39. TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;//�����l 40. TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM����Ӌ��ģʽ 41. TIM_TimeBaseInit(TIM6, &TIM_TimeBaseStructure); //����TIM_TimeBaseInitStruct��ָ���ą�����ʼ��TIMx�ĕr�g������λ 42. 43. TIM_ClearFlag(TIM6, TIM_FLAG_Update); //��������Д࣬���һ���_�Д������a���Д� 44. TIM_ITConfig(TIM6,TIM_IT_Update,ENABLE); //���_���r�������Д� 45. hcsr04_NVIC(); 46. TIM_Cmd(TIM6,DISABLE); 47. } 48. 49. 50. //tips��static������������H���ڶ��x����Դ�ļ��ȣ����Բ���Ҫ���^�ļ����� 51. static void OpenTimerForHc() //���_���r�� 52. { 53. TIM_SetCounter(TIM6,0);//���Ӌ�� 54. msHcCount = 0; 55. TIM_Cmd(TIM6, ENABLE); //ʹ��TIMx���O 56. } 57. 58. static void CloseTimerForHc() //�P�]���r�� 59. { 60. TIM_Cmd(TIM6, DISABLE); //ʹ��TIMx���O 61. } 62. 63. 64. //NVIC���� 65. void hcsr04_NVIC() 66. { 67. NVIC_InitTypeDef NVIC_InitStructure; 68. NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); 69. 70. NVIC_InitStructure.NVIC_IRQChannel = TIM6_IRQn; //�x��1�Д� 71. NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //��ռʽ�Д����ȼ��O�Þ�1 72. NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //푑�ʽ�Д����ȼ��O�Þ�1 73. NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //ʹ���Д� 74. NVIC_Init(&NVIC_InitStructure); 75. } 76. 77. 78. //���r��6�Д���ճ��� 79. void TIM6_IRQHandler(void) //TIM3�Д� 80. { 81. if (TIM_GetITStatus(TIM6, TIM_IT_Update) != RESET) //�z��TIM3�����Д�l���c�� 82. { 83. TIM_ClearITPendingBit(TIM6, TIM_IT_Update ); //���TIMx�����Д���־ 84. msHcCount++; 85. } 86. } 87. 88. 89. //�@ȡ���r���r�g 90. u32 GetEchoTimer(void) 91. { 92. u32 t = 0; 93. t = msHcCount*1000;//�õ�MS 94. t += TIM_GetCounter(TIM6);//�õ�US 95. TIM6->CNT = 0; //��TIM2Ӌ���Ĵ�����Ӌ��ֵ���� 96. Delay_Ms(50); 97. return t; 98. } 99. 100. 101. //һ�Ϋ@ȡ�����y������ �ɴΜy��֮�g��Ҫ���һ�Εr�g����������̖ 102. //�������������Ӱ푣�ȡ��Δ�����ƽ��ֵ�M�мә��V���� 103. float Hcsr04GetLength(void ) 104. { 105. u32 t = 0; 106. int i = 0; 107. float lengthTemp = 0; 108. float sum = 0; 109. while(i!=5) 110. { 111. TRIG_Send = 1; //�l�Ϳڸ��ƽݔ�� 112. Delay_Us(20); 113. TRIG_Send = 0; 114. while(ECHO_Reci == 0); //�ȴ����տڸ��ƽݔ�� 115. OpenTimerForHc(); //���_���r�� 116. i = i + 1; 117. while(ECHO_Reci == 1); 118. CloseTimerForHc(); //�P�]���r�� 119. t = GetEchoTimer(); //�@ȡ�r�g,�ֱ��ʞ�1US 120. lengthTemp = ((float)t/58.0);//cm 121. sum = lengthTemp + sum ; 122. 123. } 124. lengthTemp = sum/5.0; 125. return lengthTemp; 126. } 127. 128. 129. /*::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::: 130. ** �������Q: Delay_Ms_Ms 131. ** ��������: �ӕr1MS (��ͨ�^������Д����Ĝʴ_��) 132. ** ����������time (ms) ע��time<65535 133. :::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::*/ 134. void Delay_Ms(uint16_t time) //�ӕr���� 135. { 136. uint16_t i,j; 137. for(i=0;i<time;i++) 138. for(j=0;j<10260;j++); 139. } 140. /*::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::: 141. ** �������Q: Delay_Ms_Us 142. ** ��������: �ӕr1us (��ͨ�^������Д����Ĝʴ_��) 143. ** ����������time (us) ע��time<65535 144. :::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::*/ 145. void Delay_Us(uint16_t time) //�ӕr���� 146. { 147. uint16_t i,j; 148. for(i=0;i<time;i++) 149. for(j=0;j<9;j++); 150. } Main�����Č��F
1. #include "hcsr04.h"
2. 3. int main() 4. { 5. 6. float length; 7. 8. GPIO_cfg(); 9. NVIC_cfg(); 10. USART_cfg(); 11. printf("���ڳ�ʼ���ɹ���\n"); 12. 13. Hcsr04Init(); 14. printf("������ʼ���ɹ���\n");//�yԇ�����Ƿ�������ɾ����� 15. 16. length = Hcsr04GetLength(); 17. printf("���x��:%.3f\n",length); 18. 19. 20. } 5.�yԇ�Y�� 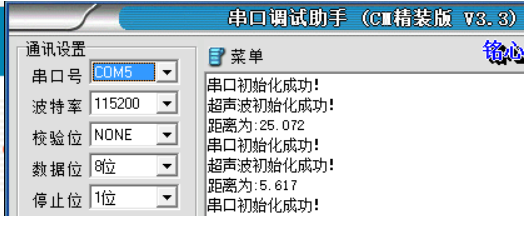
�D6 HC-SR04�����y��ģ�K�yԇ�Y��
���@���ʼ��TIM6��ÿ1ms�M��һ���Д��M�Еr�gӋ��

�D7���r����ʼ��
HCSR04�����y��ģ�K�ĕr�F���a
�D8 �����y��ģ�K�r�F���a
6.ע�����
1.���Ҫ�B�m��Μy�����x��Ҫע��y�����ڞ� 60ms���ϣ� �Է�ֹ�l����̖�������̖��Ӱ푡� 2.��ģ�K���ˎ���B�ӣ� ��Ҫ����B�ӣ� �t��ģ�K��GND�����B�ӣ� ��t��Ӱ� ģ�K������������ 3.�y���r�����y���w����e������0.5ƽ������ƽ��M��Ҫ��ƽ������tӰ표y���ĽY�� ���P�YӍ
�l���uՓ
|
ȫ����ԃ�Ԓ��400-611-6270���p���ռ�������Ո���ֵ���֙C��15010390966
�ھ���ԃ�� ���ώ�QQ��3337544669���� ���ώ�QQ��1462495461���� ���ώ� QQ��3108687497��
��I��ӖǢՄ������010-82600901��ԺУ����ǢՄ������010-82600350���ھ���ԃ��QQ��248856300��
Copyright 2004-2018 �A���hҊ�����Ƽ����F ������� ����ICP��16055225̖���������W����11010802025203̖










