CAN�������T��˺���
�r�g��2018-03-15���ߣ��A���hҊ
���y�ҵ�һƪ�܉��m�ϳ��W��CAN����ԭ�������£����С������ͨ������ԭ�t��������!
ʲô��CAN����? CAN������������܇�����F��ӿ������͂�����֮�g��ͨ�� Ø �߿ɿ��ԡ��ͳɱ���ͨ�Ņf�h�� Ø �����Robert Bosch��1986���_�l�� Ø ��Ҫ��������܇����܇�������C�����I�C���ˡ� ����һ�£�һ�v��܇����һ���ˣ�
Ø CAN��������ϵ�y��ʹ���w������֮�g��ͨ�ŵ��Ԍ��F�� Ø ECUͨ�^CAN�����B�ӣ�ԓ�����ஔ��һ������W�jϵ�y�� ʲô��ECU? Ø ����܇CAN����ϵ�y�У�ECUs�����ǰl�әC���Ɔ�Ԫ����ȫ���һ����lϵ�y�� Ø һ�v�F����܇��������70�vECUs�� CAN����5������
Ø �ͳɱ���ECUsͨ�^��CAN�ӿ��M��ͨ�ţ������ɱ��͡� Ø ���ɣ�CAN����ϵ�y���S������ECUs���M�м����e�`�\������á� Ø �ɿ��ԣ�ԓϵ�y����ϵ�y�Ĺ��Ϻ�늴Ÿɔ_���к��������ԣ�����܇����ϵ�y�������x�� Ø ��Ч�ʣ�����ͨ�^id����Ϣ�M�Ѓ��ȼ������Ա���߃��ȼ���id�����Дࡣ Ø �`���ԣ�ÿ��ECU����һ������CAN�����հlоƬ���S������CAN�������c�� CAN�����lչʷ
Ø δ���Fǰ����܇ECUs����Խ��Խ���s���c���c������ Ø 1986�꣺Bosch��˾�_�l��CAN�����f�h������܇��ӽ�Q����������SAE����ϰl���� Ø 1991�꣺Bosch��˾�l����CAN2.0������CAN 2.0A (11 λ) ��CAN 2.0B (29 λ)�� Ø 1993�꣺CAN��������˜�(ISO 11898)�� Ø 2012�꣺Bosch��˾�l����CAN FD 1.0 Ø ���죺��ÿһ�v��܇����CAN����ϵ�y�����V�������ڿ�܇��������܇�����I܇�v���������w�C���I�Ԅӻ��� CAN������δ�� չ��δ����CAN�������^�mǰ��——���Ҹ��п������S����Ӌ�㡢���W���Ԅ��{���܇���d���@Щڅ��߀�����ӿ���ʹ��WiFi /��C�W�j�B�ӵ�CAN����������——���S�o����ݔ��CAN���������������Ʒ�������
���ˌ��F�@һĿ�ˣ�CAN FD����һ���P�I�ĽM�ɲ��֡������ϣ������CAN����ϵ�y���Rһ����Ҫ���ϵK:1 Mbit/s���ٶ������S�������ٶȵď��s�Ժ����������(�����ECUs������)���@��һ��Խ��Խ������� Ø CAN FD�ṩ�ɂ��P�I��ָ�ˣ� n ������ݔ�����_��8Mbit/s——�h�h������Ҏ��1Mbit/s�� n 64�ֹ��Ĕ�����——������8�ֹ��� CAN���������Y���c���� CAN�����W�j
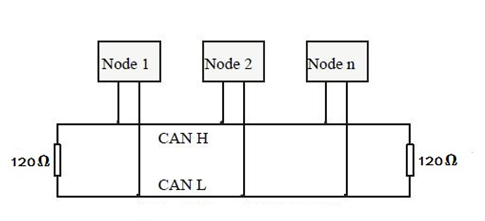
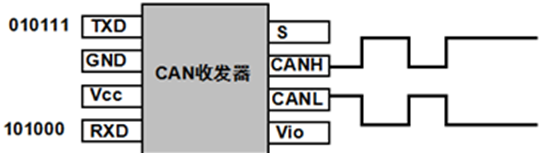
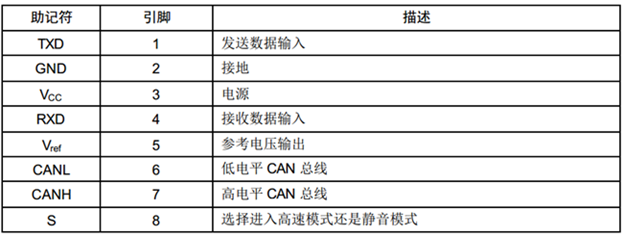
CAN�����W�j��Ҫ����CAN_H��CAN_L���������cͨ�^�@�ɗl�����F��̖�Ĵ��в�ւ�ݔ�����˱�����̖�ķ���ɔ_��߀��Ҫ��CAN_H��CAN_L֮�g����120�Wķ�ĽK����裬���Ǟ�ʲô��120�Wķ��?���������|�������迹��120�W�� CAN�հl�� CAN�հl����������ؓ؟߉�ƽ����̖�ƽ֮�g���D�Q��
����CAN����оƬݔ��߉�ƽ��CAN�հl����Ȼ���^CAN�հl���Ȳ��D�Q��߉�ƽ�D�Q������̖ݔ����CAN�����ϣ�CAN�����ϵĹ��c�����ԛQ���Լ��Ƿ���Ҫ�����ϵĔ��������w�Ĺ̶ܽ��x���£�
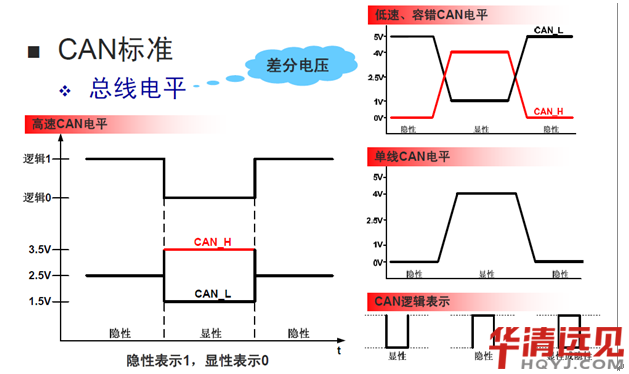
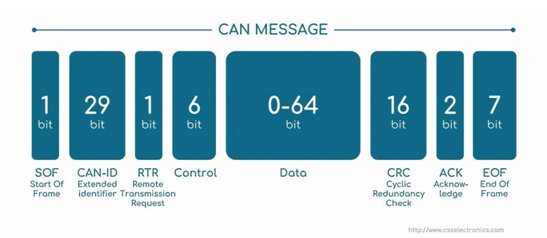
CAN��̖��ʾ CAN�������ò��w��aλ��似�g��Ҳ�����fCAN�����ϵ���̖�ЃɷN��ͬ����̖��B���քe���@�Ե�(Dominant)߉0���[�ε�(recessive)߉1����̖ÿһ��ݔ�����Ҫ���ص�߉0(�@��)���ƽ��
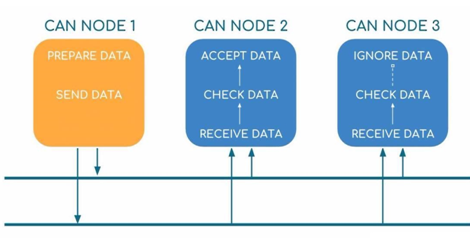
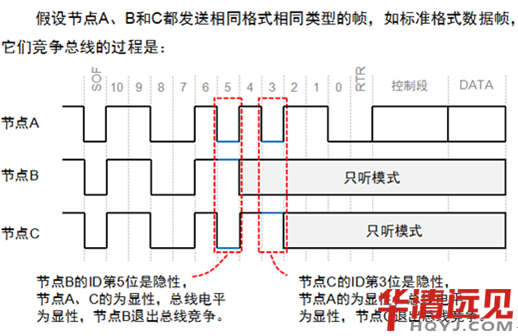
CAN�հl����TXD��RXD���cCAN�������B�ӵġ��l�����ӵ��W�j����CL��CH��CL�cCH�Dz���·��CAN�W�j������CL��CH��늉������ʾ߉“0”��߉“1”������CAN�W�j��ֻ�܆����ݔ�� CAN�ٲ� ֻҪ�������e���������κι��c�����l�͈��ģ�����Ѓɂ���ɂ����ϵĹ��c�_ʼ���͈��ģ���ô�͕����ڿ����L���_ͻ�Ŀ��ܡ�����CANʹ���˘��R������λ�ٲ÷������Խ�Q�@�����}��
���ٲ����g��ÿһ���l���������l�͵��ƽ�c���O�صĿ����ƽ�M�б��^������ƽ��ͬ���t�@����Ԫ�����^�m�l�͡�����l�͵���һ"�[��"�ƽ���Oҕ������һ"�@��"�ƽ����ô�@�����cʧȥ���ٲã�����˳��l�͠�B��������F��ƥ���λ�������ٲ����g�t�a���e�`�¼��� ��IDԽС�����ȼ�Խ�ߡ����ڔ�������RTRλ���@���ƽ���h�̎����[���ƽ�����Ԏ���ʽ�͎�ID��ͬ����r�£��������������h�̎�;���ژ˜ʎ���IDEλ���@���ƽ���Uչ����IDEλ���[���ƽ������ǰ11λID��ͬ�Ę˜ʎ��͔Uչ�����˜ʎ����ȼ��ȔUչ���ߡ� CAN����ͨ�Ņf�h �f�h��ʽ
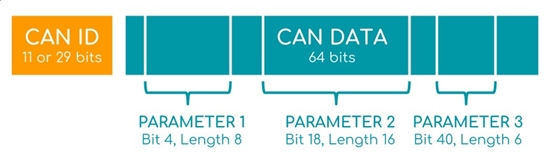
��ν��� ������ʹ��CANLoggerX000����܇��һ��ʾ����־�ļ�: # Logger type: CANLogger2000 # HW rev: 6.xx # FW rev: 5.51 # Logger ID: ID0001 # Session No.: 9 # Split No.: 3 # Time: 20170508T064128 # Value separator: ";" # Time format: 4 # Time separator: "" # Time separator ms: "" # Date separator: "" # Time and date separator: "T" # Bit-rate: 500000 # Silent mode: false # Cyclic mode: false Timestamp;Type;ID;Data 08T064254150;0;34d;1003fafa000d00ff ����҂��鿴�����ԭʼCAN���������ӱ������ܕ�ע�: ԭʼ��CAN���������]�����x! �@������҂���Ҫ�������D�Q�ɰ�����Ӌ��Ĺ���ֵ——Ҳ��������x����ʽ�� Ҫ�����@һ�c���҂���Ҫ֪��һЩ����:
���磬��34d�е�64λ�����У����ܕ���3����ͬ�����Ĕ�����ÿ����������һ���ض�����ʼ�c��λ�L�� ᘌ��@3����ͬ�����Ĕ������҂���ҪҪ֪����ν�a�� ÿ����������Ҫƫ�����Ϳ̶�ֵ [����ֵ]=[ƫ��]+[�̶�]x[ԭʼ����ֵ] ���P�YӍ
�l���uՓ
|
ȫ����ԃ�Ԓ��400-611-6270���p���ռ�������Ո���ֵ���֙C��15010390966
�ھ���ԃ�� ���ώ�QQ��3337544669���� ���ώ�QQ��1462495461���� ���ώ� QQ��3108687497��
��I��ӖǢՄ������010-82600901��ԺУ����ǢՄ������010-82600350���ھ���ԃ��QQ��248856300��
Copyright 2004-2018 �A���hҊ�����Ƽ����F ������� ����ICP��16055225̖���������W����11010802025203̖