 ��Ƭ�C��Ό��F�̾��x�ğo��������ݔ
�r�g��2018-07-26 ��Դ��δ֪
��Ƭ�C��Ό��F�̾��x�ğo��������ݔ
�r�g��2018-07-26 ��Դ��δ֪
��Ƭ�C��Ό��F�̾��x�ğo��������ݔ
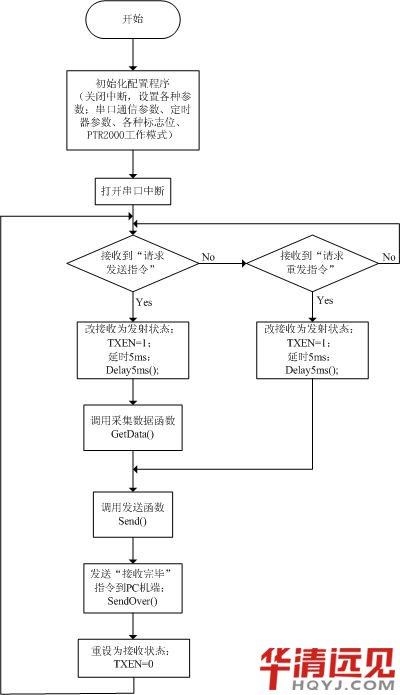
��Ƭ�C��Ό��F�̾��x�ğo��������ݔ����һЩ����đ����У���Ƭ�Cͨ�Ų���ʹ���о�������ݔ������Ҫ�̾��x�o��������ݔ���̾��x�o����ݔ���п��ɔ_���������ɿ��Ըߡ���ȫ�Ժá��ܵ���l�������١����b�`��ȃ��c�����������Æ�Ƭ�C�͌��ßo����ݔоƬ���F���εĶ̾��x�o����ݔ������Ӳ�����ְ���MCU�˺�PC�ˣ����F��Ƭ�C�cPC�C֮�g�Ĕ�����ݔ��
��Ҫ������
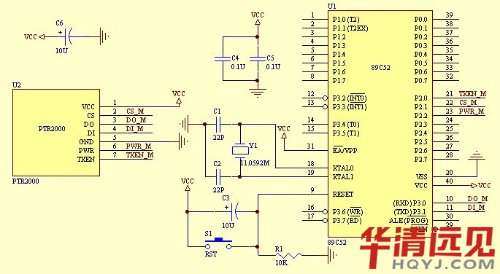
1�� ��Ƭ�C�ˣ�AT89C52��Ƭ�CоƬ�����ڿ��Ɵo��ģ�K�İl��ͽ���;PTR2000�o��������ݔģ�K��ʹ����433MHz IGM�l�Σ��������Ć�ƬUHF�o���հlһ�wоƬ�����Ժ͆�Ƭ�C�Ĵ���ֱ�����B��
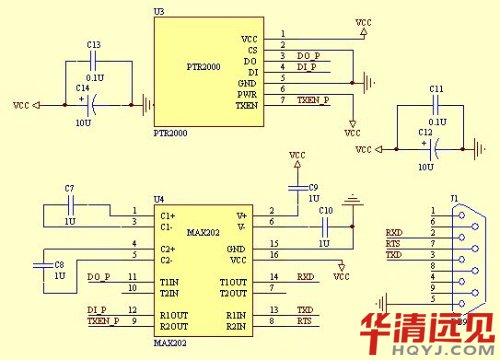
2�� PC�ˣ�PTR2000�o��������ݔģ�K;TTL�ƽ�D�QRS-232�ƽоƬMAX202��
ԇ������·�D��
��Ƭ�C��:
PC��:
ԇ������a��
//wireless.h����
#ifndef _WIRELESS_H // ��ֹwireless.h���؏�����
#define _WIRELESS_H
#include // ���ؘʎ���^�ļ�
#include
#define uchar unsigned char
#define uint unsigned int
#define REQ_SEND 0x33
#define REQ_RESEND 0x66
#define SEND_OVER 0x99
//�麆����Ҋ�����O��7λ�̶��IJɼ�����
#define DATA0 0x10
#define DATA1 0x20
#define DATA2 0x30
#define DATA3 0x40
#define DATA4 0x50
#define DATA5 0x60
#define DATA6 0x70
sbit TXEN = P2^0;
sbit CS = P2^1;
sbit PWR = P2^2;
void ClearT_buf(); // ���t_buf����
void ClearR_buf(); // ���r_buf����
void Delay5ms(); // �ӕr5ms
void GetData(); // �ɼ�����
void Send(); // �ɼ����l�ͺ���
void SendOver(); // ֪ͨPC�C�l�ͽY������
xdata uchar Flag_StartRec = 0 ; //�_ʼ���ܔ�����־λ
xdata uchar Flag_ReqSend = 0 ; //Ո��l�͘�־λ
xdata uchar Flag_ReqReSend = 0 ; //Ո���ذl��־λ
xdata uchar Flag_Delay5ms = 1 ; //�ӕr5ms��־
xdata uchar Data[7]; //�ɼ���7���ֹ�����
xdata uchar tCount = 0 ;
xdata uchar t_buf[11]; // 1�_ʼ�ֹ�"$"��1�L���ֹ�LEN��
// 7�ֹ�������1У���ֹ���
// 1 �Y���ֹ�"*"
xdata uchar rCount = 0 ;
xdata uchar r_buf[5]; // 1�_ʼ�ֹ�"$"��1�L���ֹ�LEN��
// 1�ֹ�ָ�1У���ֹ���
// 1 �Y���ֹ�"*"
#endif
//wireless.c����
#include "wireless.h"
/* ���r��0�Д�����ӳ��� */
void timer() interrupt 1 using 2
{
Flag_Delay5ms = 0;
TH0 = -5000/256;
TL0 = -5000%256;
}
void main(void)
{
ClearT_buf();
ClearR_buf();
TXEN = 0; //��ʼ����ՠ�B
PWR = 1; //��������ģʽ
CS = 0; //�x���l��0
EA=0;
/* 11.0592MHz�£��O�ô��п�9600�����ʣ�������ʽ1
8λ����λ��1λֹͣλ���o��żУ*/
TMOD = 0x21; //���r��1����ģʽ1�����r��0����ģʽ2
SCON = 0x50; //���пڹ�����ʽ1��REN=1
PCON = 0x00; //SMOD=0
TL1 = 0xfd;
TH1 = 0xfd;
TR1=1; //���r��1�_ʼӋ�r
PT0 = 1; //���r��0�߃��ȼ�
TH0 = -5000/256; //5ms
TL0 = -5000%256;
IE = 0x90; //EA=1,ES=1:���_������
while (1)
{
if (Flag_ReqSend) //�յ�“Ո��l��”ָ��
{
TXEN = 1; //��׃��l���B
Delay5ms(); //�ӕr5ms
GetData(); //�ɼ�����
Send(); //�l��
Flag_ReqSend = 0;
SendOver(); //֪ͨPC�C�l�ͽY��
TXEN = 0; //���O����ՠ�B
}
else if (Flag_ReqReSend) //�յ�“Ո���ذl”ָ��
{
TXEN = 1; //��׃��l���B
Delay5ms(); //�ӕr5ms
Send(); //�ذl
Flag_ReqReSend = 0;
SendOver(); //֪ͨPC�C�l�ͽY��
TXEN = 0; //���O����ՠ�B
}
}
}
����ƪ����:
/* �����Д�����ӳ��� */
void serial ( ) interrupt 4 using 1
{
RI = 0 ;
/* �Д��Ƿ��յ��ַ�'$'���䔵ֵ��0x24�����_ʼ����־λ*/
if ((!Flag_StartRec) && (SBUF == 0x24))
{
Flag_StartRec = 1;
}
if (Flag_StartRec)
{
if (rCount <5)
{
r_buf[rCount] = SBUF;
rCount ++;
}
/* �Д��Ƿ��յ��ַ�'*'���䔵ֵ��0x2A���������յ�ָ���O��������־λ*/
if ((r_buf[rCount -1] == 0x2A)||(rCount == 5))
{
rCount = 0;
Flag_StartRec = 0;
if (r_buf[2] == REQ_SEND) //�յ�“Ո��l��”ָ��
{
Flag_ReqSend = 1;
}
if (r_buf[2] == REQ_RESEND) //�յ�“Ո���ذl”ָ��
{
Flag_ReqReSend = 1;
}
}
else
ClearR_buf();
}
}
void ClearT_buf(void)
{
uchar xdata k ;
for (k=0;k++;k<11)
{
t_buf[k] = 0;
}
}
void ClearR_buf(void)
{
uchar xdata k ;
for (k=0;k++;k<5)
{
r_buf[k] = 0;
}
}
void Delay5ms(void)
{
TR0=1;
ET0=1;
while( Flag_Delay5ms);
ET0 = 0;
TR0 = 0;
Flag_Delay5ms = 1;
}
//�ɼ������������^����̎����ȡ�̶���7���ֹ�����
void GetData(void)
{
Data[0]=DATA0;
Data[1]=DATA1;
Data[2]=DATA2;
Data[3]=DATA3;
Data[4]=DATA4;
Data[5]=DATA5;
Data[6]=DATA6;
}
//��Ƭ�C�˰l�͔�������
void Send(void)
{
uchar xdata j = 0;
uchar xdata len = 0;
uchar xdata CheckSum = 0 ;
t_buf[0]=0x24; //��ʼλ
t_buf[1]=0x07; //7�������ֹ�
len=t_buf[1];
CheckSum = CheckSum + len;
for ( j=0;j++;j
{
t_buf[j+2] = Data[j];
CheckSum = CheckSum + t_buf[j+2];
}
t_buf[9] = CheckSum; //У���ֹ�
t_buf[10] = 0x2A; //ֹͣλ
for (j=0;j++;j<11)
{
TI =0 ;
SBUF = t_buf[j];
while ( TI ==0 );
TI =0 ;
}
}
//֪ͨPC�C�˰l�ͽY������
void SendOver(void)
{
TI =0 ;
SBUF = 0x24;
while ( TI ==0 );
TI =0 ;
SBUF = 0x01;
while ( TI ==0 );
TI =0 ;
SBUF = SEND_OVER; //֪ͨPC�C��“�l�ͽY��”
while ( TI ==0 );
TI =0 ;
SBUF = 0x99; //У���ֹ�
while ( TI ==0 );
TI =0 ;
SBUF = 0x2A;
while ( TI ==0 );
TI =0 ;
}




