�gӭ�����߶�IT�͘I(y��)��Ӗ���ҡ����A���hҊ�����Ƽ����F
![]() 400-611-6270
400-611-6270
�gӭ�����߶�IT�͘I(y��)��Ӗ���ҡ����A���hҊ�����Ƽ����F
![]() 400-611-6270
400-611-6270


Linux�µ�platform�C��
�r�g��2018-08-16���ߣ��A���hҊ
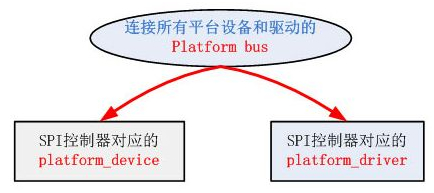
���ߣ����ώ�,�A���hҊ�����Ƽ����F�v���� ��Linux2.6�𣬃Ⱥ�������һ���µ��ӹ�����ע�ԙC�ƣ�Platform_device��Platform_driver���F��Linux�дֵ��O���Ӷ�����ʹ���@�יC�ƣ�������platform_bus���O����platform_device��ʾ������platform_driver�M��ע�ԡ� Linux���@�Nplatform driver�C�ƺ͂��y(t��ng)��device_driver�C����ȣ�һ��ʮ�����@�ă�(y��u)������platform�C�ƌ��������YԴע���M�Ⱥˣ��ɃȺ˽y(t��ng)һ���������ӳ�����ʹ���@Щ�YԴ�rͨ�^platform_device�ṩ�Ę˜ʽӿ��M����Ո��ʹ�á��@��������Ӻ��YԴ�����Ī����ԣ����ғ����^�õĿ���ֲ�ԺͰ�ȫ�ԡ�������SPI�ӌӴ�ʾ��D��Linux�е�SPI�����������SPI�����������Ŀ�����
�͂��y(t��ng)����һ�ӣ�platform�C��Ҳ�֞��������E�� 1������ע���A�Σ� �Ⱥˆ��ӳ�ʼ���r��main.c�ļ��е�start_kernel() →rest_init() →kernel_init()→do_basic_setup()→driver_init()→platform_bus_init()→ bus_register(&platform_bus_type)��ע����һ�lplatform����(̓�M������platform_bus)�� 2�������O���A�Σ� int platform_device_register(struct platform_device *pdev); //ע��һ���O�� int platform_add_devices(struct platform_device **pdevs, int ndev); //ע�Զ����O�� �O��ע�Եĕr��Platform_device_register()/platform_device_add()→(pdev→dev.bus = &platform_bus_type)→device_add()�����@�Ӱ��O��o�쵽̓�M�Ŀ����ϡ� �ɷ�������֪��: ʹ������ķ�������֪��:Platform_device_register() �@��������arch/arm/mach-s5pv210/mach-smdkv210.c �ļ���ʹ����, �ļ�λ��346��: platform_add_devices(smdkv210_devices, ARRAY_SIZE(smdkv210_devices)); Ȼ����349��̎ ���x��һ���� :MACHINE_START(SMDKV210, "SMDKV210") ,��ۙ�@�������֪���@�����Ԕ�����x, #define MACHINE_START(_type,_name) \ static const struct machine_desc __mach_desc_##_type \ __used \ __attribute__((__section__(".arch.info.init"))) = { \ .nr = MACH_TYPE_##_type, \ .name = _name, #define MACHINE_END \ }; ����֪���δ��a�����x����.arch.info.init�� ��ϵ�y(t��ng)���B���_��ָ��,���w���Բ鿴 arch/arm/kernel/vmlinux.lds �_������֪�� 3����ע���A�Σ� Platform_driver_register()→driver_register()→bus_add_driver()→driver_attach()→bus_for_each_dev(), ����ÿ������̓�M��platform bus���O����__driver_attach()→driver_probe_device(),�Д�drv→bus→match()�Ƿ��(zh��)�гɹ����˕rͨ�^ָᘈ�(zh��)��platform_match→strncmp(pdev→name , drv→name , BUS_ID_SIZE),���������{��really_probe(���H���Lj�(zh��)�������O���platform_driver→probe(platform_device)��)�_ʼ������̽�y�����probe�ɹ����t�����O�䵽ԓ�ӡ� ��������Կ�����platform�C�ƺ�߀���{����bus_register() , device_add() , driver_register()�@�����P�I�ĺ����� ���濴�ׂ��Y���w struct platform_device (/include/linux/Platform_device.h) { constchar * name; int id; struct device dev; u32 num_resources; struct resource * resource; }; Platform_device�Y���w������һ��platform�Y�����O�䣬�����а�����һ���O��ĽY���wstruct device dev;�O����YԴ�Y���wstruct resource * resource;߀���O�������const char * name��(ע�⣬�@������һ��Ҫ�ͺ���platform_driver.driver àname��ͬ��ԭ����ں����f����) ԓ�Y���w����Ҫ�ľ���resource�Y�����@Ҳ��֮��������platform�C�Ƶ�ԭ�� struct resource ( /include/linux/ioport.h) { resource_size_t start; resource_size_t end; constchar *name; unsigned long flags; struct resource *parent, *sibling, *child; }; ���� flagsλ��ʾԓ�YԴ����ͣ�start��end�քe��ʾԓ�YԴ����ʼ��ַ�ͽY����ַ(/include/linux/Platform_device.h)�� struct platform_driver { int (*probe)(struct platform_device *); int (*remove)(struct platform_device *); void (*shutdown)(struct platform_device *); int (*suspend)(struct platform_device *, pm_message_t state); int (*suspend_late)(struct platform_device *, pm_message_t state); int (*resume_early)(struct platform_device *); int (*resume)(struct platform_device *); struct device_driver driver; }; Platform_driver�Y���w������һ��platform�Y�����ӡ����г���һЩ����ָ��⣬߀��һ��һ���ӵ�device_driver�Y���� ����Ҫһ�µ�ԭ�� �����f������ע�Եĕr����{�ú���bus_for_each_dev(), ����ÿ������̓�M��platform bus���O����__driver_attach()→driver_probe_device(),�ڴ˺����Е���dev��drv��������ƥ�䣬�{�õ���drv- staticint platform_match(struct device * dev, struct device_driver * drv) { struct platform_device *pdev = container_of(dev, struct platform_device, dev); return (strncmp(pdev- } �DZ��^dev��drv��name����ͬ�t���M��really_probe()�������Ķ��M���Լ�����probe�������Mһ����ƥ�䡣����dev→name��driver→drv→name�ڳ�ʼ���rһ��Ҫ��һ�ӵġ� ��ͬ��͵��ӣ���match�����Dz�һ�ӵģ��@��platform���ӣ����^����dev��drv�����֣�߀ӛ��usb������match��?�����^����Product ID��Vendor ID�� ���˿��YPlatform�C�Ƶĺ�̎�� 1���ṩplatform_bus_type��͵Ŀ���������Щ���ǿ����͵�soc�O�䶼���ӵ��@�l̓�M�����ϡ�ʹ�ã�����——�O��——�ӵ�ģʽ���Եõ��ռ��� 2���ṩplatform_device��platform_driver��͵Ĕ����Y���������y(t��ng)��device��driver�����Y��Ƕ�����У����Ҽ���resource�ɆT���Ա��ں�Open Firmware�@�N�ӑB(t��i)���f�O���YԴ������bootloader��kernel ��܉�� ���P�YӍ
�l(f��)���uՓ
|



ȫ����ԃ�Ԓ��400-611-6270���p���ռ���(ji��)����Ո���ֵ���֙C��15010390966
�ھ���ԃ�� ���ώ�QQ��3337544669���� ���ώ�QQ��1462495461���� ���ώ� QQ��3108687497��
��I(y��)��ӖǢՄ������010-82600901��ԺУ����ǢՄ������010-82600350���ھ���ԃ��QQ��248856300��
Copyright 2004-2018 �A���hҊ�����Ƽ����F ������� ����ICP��16055225̖���������W����11010802025203̖



