�·��D��ʾ��
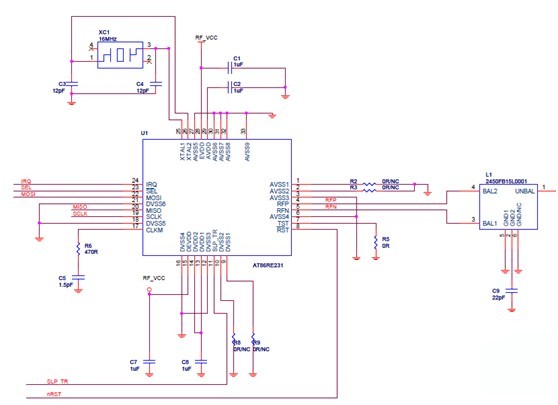
���п���оƬʹ��SAM3S4B,ͨ�^SPI��ʽ����һ��SAM3S4B�����ˣ�AT86RE231��Ķˣ��cAT86RF231�M��ͨӍ��AT86RF231��һ��I������늉���늣������ģ������������ѭIEEE802.15.4-2006 Ӳ���˜ʡ�AT86RF231��������̖�D�Q��zigbeeģʽ�IJ����̖��ͨ�^2.45Ghz���C���V����2450FB15L0001�V��������쾀�c����zigbee���c�M��ͨӍ��2450FB15L0001��Ҫ�nj����ܵ���zigbee��̖�M�ОV����
Zigbee����¾��g������Ҫ�M��Щ���ε��O�ã�
���̎�czigbee�f�h������У�����Դ�a��atmel�����b��������man�����У�SYS_sysinit();ϵ�y��ʼ���o��.h�ļ������]�о��w��C���a���@��ζZIGBEE�ľ��w�Y�����IJ��ֲ����_Դ�ġ����H��SYS_sysinit()��libBc_All_At91sam3s4c_Rf231_Iar.a�У�ԓ�ļ������b������
���У���bitcloud���g���ɵ���libHAL_Sam3sEkRf2xx_At91sam3s4c_64Mhz_Iar.a��
�@���漴�㱻��ס���҂������M��bitcloudԴ�a�ȣ����x���a����WTD������HAL_InstallInterruptVector������TimeTick_Configure����߀�ǿ����M�д��a���x�ġ��nj�zigbee��ʽ�µĺ�����ԓ���Ӹ�ۙ�������a������pio.h�У�PIO_Configure�������o������C���a�Č��F�^�̡���������ғ�pio.h�ļ���Ҋ�D1����open containing folder�����_�ļ��A���ҵ�include�е�pio.h�ļ��������Ɯy���cC�ļ�����У���ԓ������source�С��M�д��a���x��
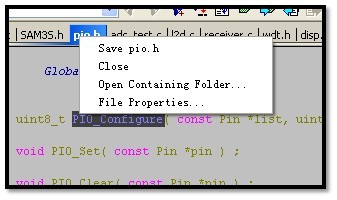
�D1
������v���У��o���f�{�����c�Č��F��
�f�{�����ֳ���
int main(void)
{
//��ʼ�������Pϵ�y����
SYS_SysInit();
..
..
for(;;)
{
//����̎��
..
..
SYS_RunTask();
}
}
SYS_SysInit();������ϵ�y�ĺ������Á���ʼ��ϵ�y��Ӳ��;
SYS_RunTask();���{��zigbee����ں��������{��BitCloud�f�h���е��Ñ����ó���APL_TaskHandler()��
voidAPL_TaskHandler(void)
{
switch (appState)
{
case APP_INITIAL_STATE:
initHardware();
initNetwork();
break;
case APP_JOINING_STATE:
startNetwork();
break;
case APP_JOINED_STATE:
break;
default:
break;
}
}
APL_TaskHandler();�@��������Ƃ����ޠ�B�C����zigbee��̎��B��̎���������ڳ�ʼ���rstatic AppState_tappState = APP_INITIAL_STATE;
����]��������W�j�����ߏľW�j�Д������������ÿ��ѭ�h�ĕr��������W�j��������ь�̎��zigbee�W�j�У��t̎��APP_JOINED_STATE��B��ֱ���˳�APL_TaskHandler()������
�҂����Կ��¾��w��B�µ��Ӻ�����
Ӳ����ʼ��ֻ�����Â�LED����zigbee�W�j���������r��led1������B�����J�W����
static void initHardware(void)
{
LED_Configure(APP_LED_0);
LED_Configure(APP_LED_1);
}
�����f�{����������zigbee���õ��P�I���֣�����һ�δ��a���������Þ�f�{�������ھW�j�ж��x�ɂ����c��
static void initNetwork(void)
{
DeviceType_tdeviceType = DEVICE_TYPE_COORDINATOR; //���óɅf�{��
CS_WriteParameter(CS_DEVICE_TYPE_ID, &deviceType);
boolpredefPANID = true;
uint16_tnwkPANID = 0x1000;
CS_WriteParameter(CS_NWK_PREDEFINED_PANID_ID, &predefPANID);
CS_WriteParameter(CS_NWK_PANID_ID, &nwkPANID);//add by jacky
// ���x�������c0
apsDataReq.dstAddrMode = APS_SHORT_ADDRESS;
apsDataReq.dstAddress.shortAddress = 0;
apsDataReq.profileId = APP_PROFILE_ID;
apsDataReq.dstEndpoint = APP_DATA_ENDPOINT;//0X20
apsDataReq.clusterId = APP_CLUSTER_ID;
apsDataReq.srcEndpoint = APP_DATA_ENDPOINT;//0X20
apsDataReq.asdu = (uint8_t *)sensor_buf;
apsDataReq.asduLength = sizeof(execute_buf);//��ݔ����
apsDataReq.txOptions.acknowledgedTransmission = 0;
apsDataReq.radius = 0;
apsDataReq.APS_DataConf = apsDataReqConf;
// ���x�������c1
apsDataReq1.dstAddrMode = APS_SHORT_ADDRESS;
apsDataReq1.dstAddress.shortAddress = 0;
apsDataReq1.profileId = APP_PROFILE_ID;
apsDataReq1.dstEndpoint = 0x40;
apsDataReq1.clusterId = APP_CLUSTER_ID;
apsDataReq1.srcEndpoint = 0x40;
apsDataReq1.asdu = (uint8_t *)execute_buf;
apsDataReq1.asduLength = sizeof(execute_buf);//��ݔ����
apsDataReq1.txOptions.acknowledgedTransmission = 0;
apsDataReq1.radius = 0;
apsDataReq1.APS_DataConf = apsDataReqConf1;
appState = APP_JOINING_STATE;
SYS_PostTask(APL_TASK_ID);
}
��ʼ���Y�������׃appState�Ġ�B��appState = APP_JOINING_STATE; �M�оW�j�ļ��������ʹ��SYS_PostTask(APL_TASK_ID);��Ͷ�f�΄գ�ϵ�y�ٴ��{��APL_TaskHandler() ȥ����case APP_JOINING_STATE�M��ȥ����startNetwork()������
startNetwork()����һ�����r���Á�����led���������ʾ�W�j���B�Ӡ�B����ע��һ���W�j�B�Ӵ_�J�Ļ��{������
static void startNetwork(void)
{
blinkTimer.interval = BLINK_TIMER_INTERVAL;
blinkTimer.mode = TIMER_REPEAT_MODE;
blinkTimer.callback = blinkTimerFired;
HAL_StartAppTimer(&blinkTimer);
startNetworkReq.ZDO_StartNetworkConf = ZDO_StartNetworkConf;//���{����
ZDO_StartNetworkReq(&startNetworkReq);
}
���{�����У���Ҫ���Д�zigbee�W�j�B�ӣ��B�ӳɹ����P�]���r����ע�ԾW�j���c��
static void ZDO_StartNetworkConf(ZDO_StartNetworkConf_t* conf)
{
HAL_StopAppTimer(&blinkTimer); //add by lht
if (ZDO_SUCCESS_STATUS == conf->status)
{
appState = APP_JOINED_STATE;
// ע�ԾW�j���c0
registerDataEndpointReq.simpleDescriptor = &dataEndpoint;
registerDataEndpointReq.APS_DataInd = APS_DataIndData;
APS_RegisterEndpointReq(®isterDataEndpointReq);
// ע�ԾW�j���c1
registerDataEndpointReq1.simpleDescriptor = &dataEndpoint1;
registerDataEndpointReq1.APS_DataInd = APS_DataIndData1;
APS_RegisterEndpointReq(®isterDataEndpointReq1);
}
else
{
appState = APP_JOINING_STATE;
}
SYS_PostTask(APL_TASK_ID);
}
zigbee�����l�ͺ�����
static void sendDataBlock(unsigned char channel)
{
switch(channel)
{
case Sensor:
APS_DataReq(&apsDataReq);
break;
case Execute:
APS_DataReq(&apsDataReq1);
break;
default:
break;
}
}
zigbee�������ܺ�����
static void APS_DataIndData(APS_DataInd_t *ind) //data come from sensor module
{
zigbee_in_flag = 1;
memcpy(&sensor_data[1],ind->asdu, 18);
sensor_from_address = ind->srcAddress.shortAddress;
}
static void APS_DataIndData1(APS_DataInd_t *ind) //data come from excute module
{
memcpy(init_data,ind->asdu, 30);
to_excute_address = ind->srcAddress.shortAddress;
if(init_data[0] == 0xaa)
{
enable_count = 1;
excute_open = 1;
}
}
��zigbee�Ĺ��c����APL_TaskHandler()���c�f�{�������ж�Ġ�B�ǣ��x�_zigbee�W�j�����x�ĺ���APP_LEAVE_STATE��
voidAPL_TaskHandler(void)
{
switch (appState)
{
case APP_INITIAL_STATE:
&nbnbsp; initHardware();
initNetwork();
break;
case APP_JOINING_STATE:
startNetwork();
break;
case APP_JOINED_STATE:
break;
case APP_LEAVE_STATE:
&nbsnbsp; leaveNetwork();
break;
case APP_LEAVING_STATE:
break;
default:
break;
}
}







