ARM core ��Bһ
�r�g��2016-12-14���ߣ��A���hҊ
һ��ARM̎���������c (1)֧�ֵĔ������ A.�ֹ� 8bit (2)����32λ����ָ���RISC��̎�����ܘ� ARM̎�������Թ����ڃɷN��B: A . ARM��B ָ���L�Ȟ�32λ���@�N��B���е������R��ʽ��ARMָ�� B. Thumb��B ָ���L�Ȟ�16λ���@�N��B���а����R��ʽ��Thumbָ�� ����:�@�ɂ���B�g���ГQ����Ӱ�̎����ģʽ�ͼĴ������� С֪�R:RISC��CISC ָ��ď�����CPU����Ҫָ�ˣ�ָ������̎����Ч�ʵ���Ч����֮һ���ĬF�A�ε������wϵ�Y���v��ָ��ɷ֞���sָ�(CISC)�;���ָ�(RISC)�ɲ��֡������ģ�̎���S��ָ��ď��s��Ҳ�ɷ֞�CISC��RISC�@��� CISC��һ�N���˱��ھ��̺����ӛ���w�L��Ч�ʵľ�Ƭ�OӋ�wϵ����20���o90�������֮ǰ���������̎����������CISC�wϵ——����Intel��80x86��Motorola��68Kϵ�еȡ���ͨ�����f��X86�ܘ����nj���CISC�wϵ�ġ�RISC�Ǟ������̎�����\�е��ٶȶ��OӋ�ľ�Ƭ�wϵ�������P�I���g������ˮ��������Pipelining������һ���r���������ɶ��lָ�������ˮ���Լ����������g���ձ��ھ�Ƭ�OӋ��ʹ�á�RISC�wϵ�����ڷ�x86ꇠI������̎����CPU����ARM��Advanced RISC Machines�����ȿ����J����һ����˾�����֣�Ҳ�����J���nj�һ�̎������ͨ�Q��߀�����J����һ�N���g�����֡���ARM�wϵ�Y��Ŀǰ�����J���ǘI���32λǶ��ʽRISC ̎�����Y��������ARM̎���������@һ�wϵ�Y���� (1)CISC CISC���sָ��ϵ�yӋ��Cͨ�^����Ӌ��Cָ��ϵ�y���ܣ�ͨ�^����ȥ���д������ܸ�����ָ��Ķ�����Ӌ��Cϵ�y�����ܡ� ���ھ��д�����ָ����CISC�wϵ�ă�ȱ�cҲ�����@�� ���c�� a)�����S����ָ��ϵ�y���ܴ�̶��Ϻ����˳����OӋ���y�ȡ� b)CISC�в�Ҫ��ָ���L�Ƚyһ�����Թ�ʡ�惦���g�� c)CISCָ�����ֱ�ӌ��惦��������ʹ��ͨ�üĴ�����Ŀ�^�١� ͬ�rCISCָ��ϵ�yҲ�����ܶ����}�� a)����ָ��ϵ�y����ַ��ʽ��ָ���ʽ�^�ָ࣬���L�Ȳ�һ��������Ӳ�����s�����OӋ�ɱ��^�ߡ� b)ָ��������s�����������L���ٶȵͣ��y�ԃ������g���ɸ�Ч�ęC���Z�ԡ� c)�S��ָ��ʹ���l�ȵͣ�������ϵ�yؓ�����������ԃr�ȡ� (2)RISC ��CISC��ȣ�RISC��ָ���Ҫ�ٵö࣬ͨ���ڎ�ʮ�l���ң�������OӋ˼���DZM������Ӌ��C��ָ��ܣ��Ķ�����Ӳ������ָ��ď��s�ȣ����ܛ����Ӳ�������ṩ������`���Ժ��ߵ����ܡ����CISC����Ҫ���c���£� a) ����ָ���ֻ�����˔������١����ܺ��Ρ�����һ���C�����ڃ���ɵ�ָ����Ҫ���Џ��s�ij����܄tͨ�^�ӳ��������ʹ�Ï��sָ��팍�F�� b)ָ���L����ͬ��ÿ�lָ����L�ȶ�����ͬ�ģ�������һ���Ϊ���������ɡ� c) �ΙC������ָ��������ָ�������һ���C����������ɣ��������S̎������ͬһ�r�g�Ȉ���һϵ�е�ָ� ʹ��RISCָ����������ݣ� a) ����ָ��ϵ�y���OӋ�m�ϳ���Ҏģ�����·�Č��F������ָ��l�������^�٣���ַ��ʽ���Σ�ָ���ʽҎ�����cCISC�Y����ȣ����������g�a�͈���Ӳ���������Σ����оƬ�����ڌ��F�������ľ��w��e���@�pС�� b)��ʹ����ͬ�ľ�Ƭ���g����ͬ�\�Еr��£�RISCϵ�y���и�����\���ٶȡ�������ָ��ϵ�y���Լӿ�ָ����g�a���������ĺ������Կs��ָ��Ĉ����ӕr�ȣ��@Щ��������߳���Ĉ����ٶȡ� c)�����ṩֱ��֧�ָ��Z�Ե��������������g������OӋ��ָ����Ĝp�٣��sС�˾��g�^���Ќ�������ƵęC��ָ����x�����p�p�ˌ����N��ַ��ʽ�M���x������׃�Q��ؓ�������ڸ��Q��ȡ��ָ��{��ָ�������߳����\���ٶȡ� d)RISC̎��������������CISC̎�����OӋ�����Σ�����Ҫ�ĕr�g��׃�ø��̣������Ա�CISC̎�������ø������M�ļ��g���_�l�������һ��̎������ �����ģ�RISCҲ����һЩȱ�c����Ҫ�У� a) ����ָ���٣���˼����˅R������T��ؓ���������˙C���Z�Գ�����L�ȣ��Ķ�ռ�����^��Ĵ惦���g�� b) �������f��RISC�����g����Ҫ����ߣ����ָ��Σ�RISC�Y�������ܾ���ه�ھ��g����Ч�ʡ����g���ă���ֱ��Ӱ�̎���������ܰl�]�� �C��������������Ҫ���Mһ�����^CISC�cRISC֮��������������c���M�з����� 1��ָ����γɣ�CISC��ָ����s���ʲ�ָ��a���Ɔ�Ԫ���OӋ����RISC��ָ��90%����Ӳ�wֱ����ɣ�ֻ��10%��ָ������ܛ�w�ԽM�ϵķ�ʽ��ɣ����ָ����Еr�g��RISC�^�̣���RISC���ROM���g�����ı��^������RAMʹ�ô�С��ԓ�c����đ��ñ��^���Pϵ�� 2����ַģʽ��CISC����Ҫ�^��Ķ�ַģʽ����RISCֻ���ٔ��Ķ�ַģʽ�����CPU��Ӌ��ӛ���w��Чλַ�r��CISCռ�õ������^�ࡣ 3��ָ�����ڣ�CISCָ��ĸ�ʽ�L�̲�һ�����Еr�����ڴΔ�Ҳ���yһ����RISC�Y�������෴�����m�ϲ��ùܾ�̎���ܘ����OӋ���M�������_��ƽ��һ�������һָ��ķ���Ŭ�����@Ȼ�ģ����OӋ��RISC�^CISC���Σ�ͬ�r���CISC�Ĉ��в��E�^�࣬�e�õĆ�Ԫ�·�ȴ��r�g���L��������ƽ��̎�����OӋ�����Ծ�Ч�ܶ���RISC�^CISC߀��վ�����L����RISC��ָ���������ɑ��ó�ʽ�a׃����Ҫ�^��ij�ʽӛ���w���g���Ҵ���ָ��N��^��ȵȵ�ȱ�c�� 4������ʹ�üĴ��� ����ARM̎������ģʽ�c���� ARM�wϵ�Y����Ҫ֧��7�N̎����ģʽ���քe�� : �Ñ�ģʽ�����Д�ģʽ���Д�ģʽ������ģʽ����ֹģʽ��δ���xģʽ��ϵ�yģʽ
(1)ϵ�y(sys),���Д�(fiq)���Д�(irq)������(svc)����ֹ(abt)��δ���x(und)�@���Nģʽ�ɞ��ؙ�ģʽ (2)���Д�(fiq)���Д�(irq)������(svc)����ֹ(abt)��δ���x(und) �@��N�ɞ鮐��ģʽ
˼��:��ʲô̎������OӋ���@ô��ģʽ��? ̎����֮���Ա��OӋ���@ô��ģʽ��Ŀ���Ǟ����܉���õ�̎�����N������ ��ʲô�Ǯ�����?���^�Į�����ָ�ľ�����ֹ�˳����������е��^�̶����ò�ȥ��ɵ�һЩ���������оƬ��λ��ȡָʧ����ָ��δ���x���ȵȡ�
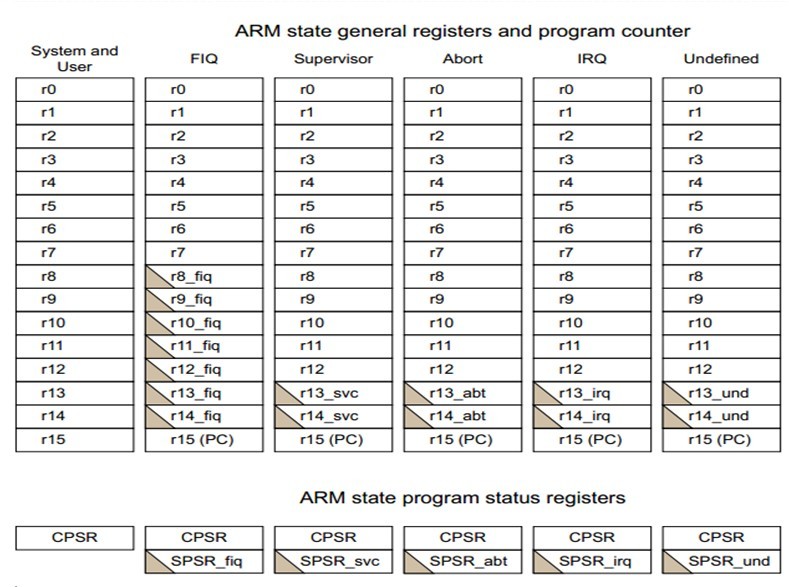
��Щͬ�W�ڴ�W�ĕr�W�^51��Ƭ�C��֪���Д�ĸ�����@���Д��䌍Ҳ��һ�N�������@����Д�����ⲿӲ���a�����ⲿ�Д����оƬ�Ȳ�Ӳ���a���ăȲ��Дࡣ���Д�a���Į�����������������̎�������ĽǶȁ����]���κ΅^�e�������҂������@Щ�����yһ�����о��� ע��:��������r�£�һ����ͨ������ܕ��\�����Ñ�ģʽ��ϵ�yģʽ�£��������l���r��ARM�͕��Ԅ��ГQ������ģʽȥ̎��������̎������ֻص��Ñ�ģʽ��ϵ�yģʽ���^�m֮ǰ�Ĺ��������ÿһ�Nģʽ������������˽���YԴ����˿��Ա��C��̎�������ĕr��ԭ���ij���h���������µĭh���Ɖģ��Ķ����C��ϵ�y������������ע��:��������r�£�һ����ͨ������ܕ��\�����Ñ�ģʽ��ϵ�yģʽ�£��������l���r��ARM�͕��Ԅ��ГQ������ģʽȥ̎��������̎������ֻص��Ñ�ģʽ��ϵ�yģʽ���^�m֮ǰ�Ĺ��������ÿһ�Nģʽ������������˽���YԴ����˿��Ա��C��̎�������ĕr��ԭ���ij���h���������µĭh���Ɖģ��Ķ����C��ϵ�y������������ ���ˣ��P��ARM�Į�������ģʽ�ͽ�B���@������҂�������ARMÿ�Nģʽ�������еļĴ����� ����ARMÿ�Nģʽ���еļĴ��� ǰ���҂��v����ARMʹ�õ���RSIC�ܘ�����RSIC�ܘ����c֮һ����ʹ�ô����Ĵ�����ARM̎����֧�ֶ�ģʽ��ÿ�Nģʽ����һЩ�Ĵ����ǹ��õģ���һЩ��˽�еġ�
���@����Ժ��ο��Yһ�£� (1)ARM������37���Ĵ���������R0-R7,CPSR��R15(pc)���κ�ģʽ�¶����õĵļĴ��� (2)�Ñ�ģʽ��ϵ�yģʽʹ����ͬ�ļĴ���R0-R15,CPSR (3)ÿ�N����ģʽ�����Լ��� SPSR,R13��R14 (4)FIQģʽ���˹���R0-R7�Ĵ����⣬߀���Լ�˽�е�R8-R12,����ģʽ�]���Լ�˽�е�R8-R12�Ĵ��� ע��:Cortex�wϵ�Y������40��32-Bits�L�ļĴ���Cortex-A���3���Ĵ�����Monitor ģʽ r13_mon , r14_mon, spsr_mon �����҂�һ���������@Щ�Ĵ�������ʲô���ðɡ� �ġ�ARM��ÿ���Ĵ�������; (1)R0-R12 �@Щ�Ĵ����҂������S��ʹ�ã������҂���C�Z��һ�ӣ�����Ҫ���x׃������ARM��������@Щ�����ѽ����x�õ�׃��������ֱ���Á�ʹ�ã�ÿ���������Á����һ��32bit�Ĕ�Ŷ�� (2)R13,R14�@�ɂ��Ĵ�����Ҫע���ˣ�ǰ���҂������^�������еĮ���ģʽ�¶����Լ���˽�е�R13��R14,��ÿ�N����ģʽ�ڲ���R13��R14,����������ģʽ��R13��R14��ֵ�a��Ӱ푡� R13�҂��ֽ���sp,Ҳ�����҂����f�ė�ָᘡ����C�Z�Եľֲ�׃���r��Ҫ�뗣�ģ�Ҳ�����f��������һ�Nģʽ��,����҂����{��C�Z�Գ�������֮ǰ���O�úÌ���ģʽ��spָᘡ� R14��朽ӼĴ�����LR�����ڽY�����Ѓɂ�����ܣ� (1)��ÿ�Nģʽ�£�ģʽ������R14���ڱ����ӳ��ص�ַ�� (2)���l�������r����R14�����Į���ģʽ�O�Þ鮐�����ص�ַ����Щ������һ��С�Ĺ̶�ƫ�������� (3)�Ĵ���R15�����Ӌ������PC������ָ������ȡָ�ĵ�ַ��Ҳ���fR15���������һ�lָ��ĵ�ַ��CPU�͕��Aȡ��һ�lָ� (4)�Ĵ���CPSR������B�Ĵ���,���r��ӛ�CPU�Ġ�B
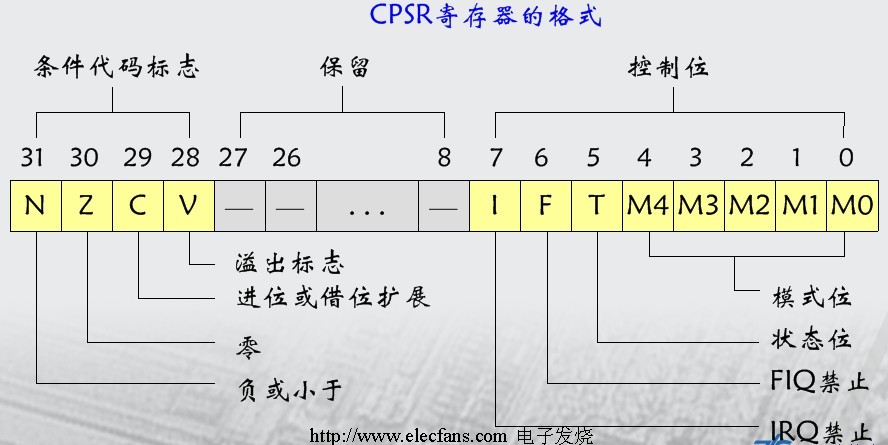
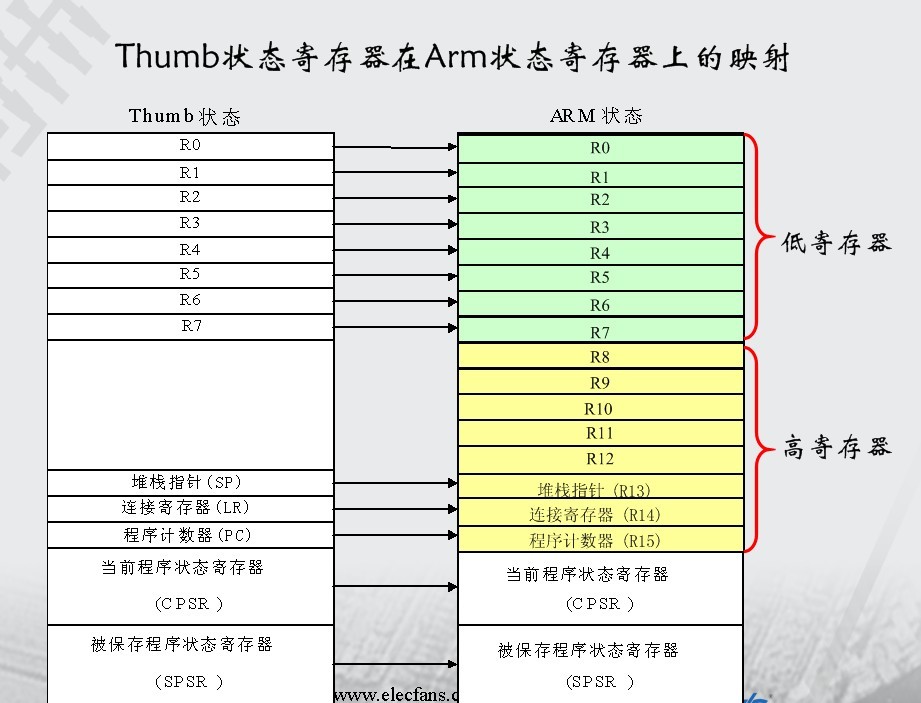
ͨ�^�ψD�҂�����֪����CPSRӛ���̎������ǰ������ģʽ��FIQ��IRQ�Д��Ƿ�ʹ�ܣ�ָ��l�����нY������Ϣ�� �����҂�Ԕ��������ÿһλ�քe����ʲô��˼: A.�l�����a��־ (N ) �\��Y���ĸ�λ��ӳ��ԓ��־λ�������з�̖���M���a�a���Y����ؓ���rN=1���Y������������rN=0�� (Z ) ָ��Y����0�rZ=1��ͨ����ʾ���^�Y������ȡ�������tZ=0�� (C ) ���M�мӷ��\��(����CMNָ��)�����Ҹ�λ�a���Mλ�rC=1����tC=0�����M�Мp���\��(����CMP ָ��)�����Ҹ�λ�a����λ�r C=0����tC=1�����ڽY����λ�����ķǼӷ�/�p��ָ�C��ĸ�λ���Ƴ���ֵ������ָ��Cͨ����׃�� (V)�M�мӷ�/�p���\�㣬���Ұl���з�̖����rV=1����tV=0������ָ��Vͨ����׃�� B. �Д��ֹλ����I��Fλ ��Iλ��λ�r��IRQ�Д౻��ֹ�� ��Fλ��λ�r��FIQ�Д౻��ֹ�� C.Tλ��ӳ�����ڲ����Ġ�B ��Tλ��λ�r��̎��������Thumb��B���\�У� ��Tλ����r��̎��������ARM��B���\�С� D.ģʽλ ģʽλ����M4��M3��M2��M1��M0���@Щλ�Q��̎�����IJ���ģʽ�� 10000 User mode ; 10001 FIQ mode; 10011 SVC mode ; 10111 Abort mode ; 11011 Undfined mode; 11111 System mode; 10110 Monitor mode; 10010 IRQ ע�⣺��������ģʽλ�ĽM�϶����x����Ч��̎����ģʽ�����ʹ�����e�`���O�ã�������һ���o���֏͵��e�` (5)SPSR �����B����Ĵ��� ÿ�N���������Լ���SPSR������鮐���¼����M�뮐���r������CPSR�Į�ǰֵ�������˳��r��ͨ�^���֏�CPSR�� �塢Thumb��B�µļĴ��� ARM��B��Thumb��B֮�g�Ĵ������Pϵ Thumb��B�Ĵ����cARM��B�Ĵ��������µ��Pϵ�� Thumb��BR0��R7�cARM��BR0��R7��ͬ�� Thumb��BCPSR��SPSR�cARM��BCPSR��SPSR��ͬ�� Thumb��BSPӳ�䵽ARM��BR13�� Thumb��BLRӳ�䵽ARM��BR14�� Thumb��BPCӳ�䵽ARM��BPC��R15����
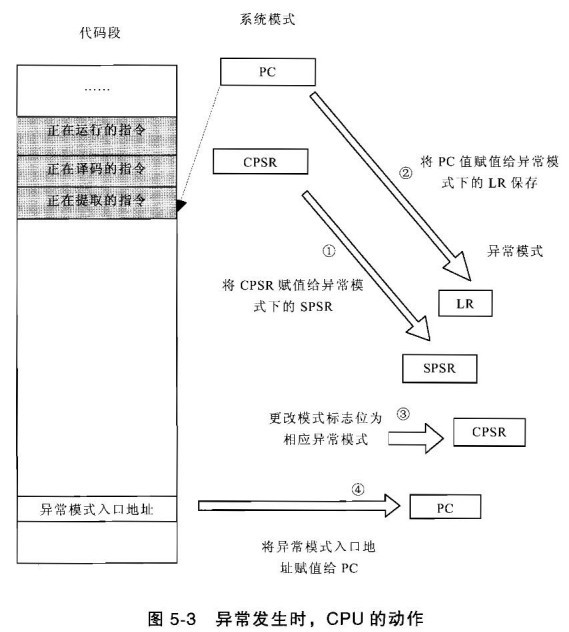
ע��: ��Thumb��B�У��Ĵ�����R8��R15�����ǘ˜ʼĴ�������һ���� ����ARM����̎�� ǰ���҂��ѽ��f�^�����ˣ����^�Į������������CPU���������б���࣬�����ò�ȥ���һЩ����Ĺ�������Щͬ�W���ܸ��X߀�����c�����e�������f��һ�°ɣ�����������Ŭ���Č����a���@���r��������I�ˣ���횵ý�Qѽ�����ֹͣ�����a��ȥ����ˣ�����������^�m�����a�ˣ��^��һ��������˯�x�������ˣ���횵�˯�Xѽ����������ҹ�]˯�ˡ�˯��֮�������_ʼ�����a���@��Ķ����I���˯�x�Ϳ�������ɮ�����r����횵�̎����̎�����߀�û֏���ǰ�Ġ�B�� �Ǯ����a���ĕr��Ӳ���ϕ��Ԅ�����Щ������?ע����Ӳ���Ԅ�����Ŷ������Ҫ�҂�����ġ� ��һ�N�����l���r��Ӳ���͕��Ԅӈ���������: (1)��CPSR���浽��������ģʽ�µ�SPSR�� (2)��PC�Ĵ������浽��������ģʽ�µ�LR�� (3)��CPSR�O�ó������Į���ģʽ (4)�O��PC�Ĵ�����ֵ������̎���������ڵ�ַ ���Կ��Y���D:
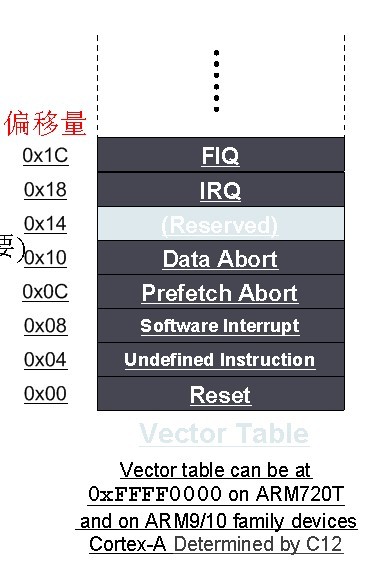
���ĵ�ͬ�W�͕��l�F���@���PC�Ĵ�����ֵ���Ǒ�ԓָ�����ڈ��е�ָ���?��ʲô�D�Ѕsָ�������������ָ��@���"������ȡ"����ʲô���x��?�Ǻǣ��@���漰����ˮ���Ć��}�ˣ��P����ˮ���҂��������B�ġ� �@���҂�߀���ȸ����ף������a���ĕr��Ӳ����ԓ��PCֵ�O�������?Ҫ�������@�����}��߀�����֪��һ������"����������"�� ARMһ����5�N����ģʽ����������ÿһ�N����ģʽ����ԓ��һ��Ψһ����ڵ�ַ���@Щ��ڵ�ַ�˴��������҂�һ��Q֮�鮐����������
�������a���ĕr��Ӳ�����Ԅӌ�PC��ֵ�O�Þ錦������������ڵ�ַ�����w���������������ʲôλ�ã��҂�����ͨ�^���P�ąf̎��ָ���M���O�þͿ����ˡ��@���҂��ں��ڵ��n���Е��v���� ���˵��@��҂��ѽ�֪���ˣ������l���r��Ӳ�����Ԅ�������Щ���顣�Ǯ������صĕr��Ӳ��Ҳ���Ԅ���һЩ�����?�Ǻǣ����Ǜ]�С��������صĕr����T�������������: �������� (1)�� SPSR_<mode>�֏�CPSR (2)��LR_<mode>�֏�PC �@Щ����a����Ч�����ǻ֏ͬF��Ŷ��
���P�YӍ
�l���uՓ
|