һ������
Մ����linuxϵ�y�¾���I2C�ӣ�Ŀǰ��Ҫ�ЃɷN��ʽ��һ�N�ǰ�I2C�O�䮔��һ����ͨ���ַ��O���̎������һ�N������linux I2C���wϵ�Y������ɡ�������^���@�ɷN�ӡ�
��һ�N�����ĺ�̎�������ڶ��N�������ӄݣ��У�
�� ˼·���^ֱ�ӣ�����Ҫ���r�gȥ�˽�linux�Ⱥ��Џ��s��I2C��ϵ�y�IJ���������
��һ�N�������}�������ڶ��N�����ĺ�̎���У�
�� Ҫ�̎����HҪ��I2C�O��IJ�����Ϥ������Ҫ��ϤI2C���m����������
�� Ҫ�̎���I2C���O������I2C���O��������������^��Ϥ����Ҫ���nj����ij������ֲ�Բ
�� ���Ⱥ˵��YԴ�o��ֱ��ʹ�á����Ⱥ��ṩ������I2C�O�������O���Ӷ��ǻ���I2C��ϵ�y�ĸ�ʽ��I2C�m�����IJ�������߀�ã�����������s��I2C�m�������磺����PCI��I2C�m���������������͕���ܶࡣ
����ᘌ��Č�������ϤI2C�f�h��������ʹ��linux�Ⱥ���ϵ�y���_�l�ˆT��
�W�j��һЩ�������н�BI2C��ϵ�y��Դ�a�Y�������l�F�ܶ��_�l�ˆT�����@Щ���º�߀�Dz�����Լ�����ԓ��Щʲô������ԭ��߀�Ǜ]Ū���I2C��ϵ�y���҂�����Щʲô���Լ��҂���������I2C��ϵ�y����������Ҫ��Q��������ìF�ЃȺ�֧�ֵ�I2C�m��������Ɍ�I2C�O��IJ�����Ȼ�����^�ȵ��m�������a�ľ�����������Ҫ�Ľ�Q���}�ĽǶ�ȥ���������漰�eԔ���Ĵ��a��ۙ��
����I2C�O���ӳ���
����Ҫ���_�m�����ӵ��������҂��܉�ͨ�^���l������I2C�˜ʅf�h�ĕr��
��Linux�Ⱥ�Դ���a�е�drivers/i2c/bussesĿ��°�����һЩ�m�������ӡ���S3C2410����i2c-s3c2410.c�����m�������d���Ⱥ˺����Ĺ�����Ҫᘌ����w���O�侎���O�����ˡ�
����I2C�O����Ҳ�ЃɷN������һ�N������ϵ�y�o�҂��ṩ��i2c-dev.c�팍�Fһ��i2c�m�������O���ļ���Ȼ��ͨ�^�ڑ��ÌӲ���i2c�m����������i2c�O�䡣��һ�N�Ǟ�i2c�O�䣬��������һ���O���ӡ�ע�⣺�ں�һ�N��r�£��Dz���Ҫʹ��i2c-dev.c�ġ�
1������i2c-dev.c�����m�������M������i2c�O��
i2c-dev.c���]��ᘌ��ض����O����OӋ��ֻ���ṩ��ͨ�õ�read()��write()��ioctl()�Ƚӿڣ����Ìӿ��Խ����@Щ�ӿ��L��������m�����ϵ�i2c�O��Ĵ惦���g��Ĵ�����������I2C�O��Ĺ�����ʽ��
��Ҫ�eע����ǣ�i2c-dev.c��read()��write()������ֻ�m�������·�ʽ�Ĕ�����ʽ���ɲ鿴�Ⱥ����PԴ�a��

�D1 ���_ʼ��̖�r��
���Բ�����̫����ͨ���ԣ��������@�N��r�Ͳ��m�ã�ͨ�����F���xĿ�˕r����

�D2 ���_ʼ��̖�r��
����read()��write()����ֻ�m�������m����֧��i2c�㷨����r���磺
static const struct i2c_algorithm s3c24xx_i2c_algorithm = {
.master_xfer = s3c24xx_i2c_xfer,
.functionality = s3c24xx_i2c_func,
};
�����m���m����ֻ֧��smbus�㷨����r���磺
static const struct i2c_algorithm smbus_algorithm = {
.smbus_xfer = i801_access,
.functionality = i801_func,
};
��������ׂ�ԭ������һ�㶼����ʹ��i2c-dev.c��read()��write()���������õ���ioctl()������ioctl()�������Ԍ��F�������е���r���ɷN������ʽ���Լ�I2C�㷨��smbus�㷨����
ᘌ�i2c���㷨����Ҫ��Ϥstruct i2c_rdwr_ioctl_data ��struct i2c_msg��ʹ�õ�������I2C_RDWR��
struct i2c_rdwr_ioctl_data {
struct i2c_msg __user *msgs; /* pointers to i2c_msgs */
__u32 nmsgs; /* number of i2c_msgs */
};
struct i2c_msg {
_ _u16 addr; /* slave address */
_ _u16 flags; /* ��־���x������ */
_ _u16 len; /* msg length */
_ _u8 *buf; /* pointer to msg data */
};
ᘌ�smbus�㷨����Ҫ��Ϥstruct i2c_smbus_ioctl_data��ʹ�õ�������I2C_SMBUS������smbus�㷨������Ҫ���]“���_ʼ��̖�r��”���}��
struct i2c_smbus_ioctl_data {
__u8 read_write; //�x����
__u8 command; //����
__u32 size; //�����L�Ș��R
union i2c_smbus_data __user *data; //����
};
������һ�������v������ľ��w�^�̡�ͨ�^S3C2410����AT24C02 e2prom�����F��AT24C02������λ�õ��x�������ܡ�
�����ڃȺ����ѽ������ˌ�s3c2410 �е�i2c�������ӵ�֧�֡��ṩ��i2c�㷨����smbus��͵ģ����Ժ����ioctl��������I2C_RDWR��
static const struct i2c_algorithm s3c24xx_i2c_algorithm = {
.master_xfer = s3c24xx_i2c_xfer,
.functionality = s3c24xx_i2c_func,
};
����һ������Ҫ�_�����ˌ��F��AT24C02 e2prom�IJ�������Ҫ�_��AT24C02�ĵ�ַ���x���L���r��
�� AT24C02��ַ�Ĵ_��


ԭ��D�ό�A2��A1��A0���ӵ��ˣ����Ե�ַ��0x50��
�� AT24C02�����ַ�ֹ����ĕr��

��Ҋ�˕r�����ǰ���ᵽ��“���_ʼ��̖�r��”
�� AT24C02�����ַ�ֹ��x�ĕr��
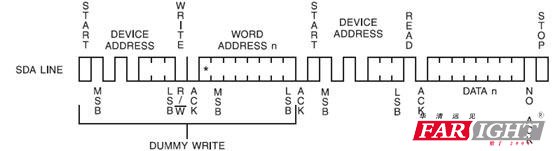
��Ҋ�˕r�����ǰ���ᵽ��“���_ʼ��̖�r��”
�����_ʼ���w���a�ķ��������a��2.6.22�Ⱥ��Ϝyԇͨ�^����
/*i2c_test.c
* hongtao_liu <lht@farsight.com.cn>
*/
#include <stdio.h>
#include <linux/types.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/ioctl.h>
#include <errno.h>
#define I2C_RETRIES 0x0701
#define I2C_TIMEOUT 0x0702
#define I2C_RDWR 0x0707
/*********���xstruct i2c_rdwr_ioctl_data��struct i2c_msg��Ҫ�̓Ⱥ�һ��*******/
struct i2c_msg
{
unsigned short addr;
unsigned short flags;
#define I2C_M_TEN 0x0010
#define I2C_M_RD 0x0001
unsigned short len;
unsigned char *buf;
};
struct i2c_rdwr_ioctl_data
{
struct i2c_msg *msgs;
int nmsgs;
/* nmsgs�@�������Q�����ж����_ʼ��̖������“���_ʼ�r��”��ȡ1*/
};
/***********������***********/
int main()
{
int fd,ret;
struct i2c_rdwr_ioctl_data e2prom_data;
fd=open("/dev/i2c-0",O_RDWR);
/*
*/dev/i2c-0����ע��i2c-dev.c��a���ģ�����һ���ɲ������m�����������ʹ��i2c-dev.c
*�ķ�ʽ���͛]�У�Ҳ����Ҫ�@�����c��
*/
if(fd<0)
{
perror("open error");
}
e2prom_data.nmsgs=2;
/*
*�������r���У������õ�2���_ʼ��̖���ֹ��x�����У������Դˌ�
*e2prom_data.nmsgs����2
*/
e2prom_data.msgs=(struct i2c_msg*)malloc(e2prom_data.nmsgs*sizeof(struct i2c_msg));
if(!e2prom_data.msgs)
{
perror("malloc error");
exit(1);
}
ioctl(fd,I2C_TIMEOUT,1);/*���r�r�g*/
ioctl(fd,I2C_RETRIES,2);/*�؏ʹΔ�*/
/***write data to e2prom**/
e2prom_data.nmsgs=1;
(e2prom_data.msgs[0]).len=2; //1�� e2prom ����Ŀ�˵ĵ�ַ��1������
(e2prom_data.msgs[0]).addr=0x50;//e2prom �O���ַ
(e2prom_data.msgs[0]).flags=0; //write
(e2prom_data.msgs[0]).buf=(unsigned char*)malloc(2);
(e2prom_data.msgs[0]).buf[0]=0x10;// e2prom ����Ŀ�˵ĵ�ַ
(e2prom_data.msgs[0]).buf[1]=0x58;//the data to write
ret=ioctl(fd,I2C_RDWR,(unsigned long)&e2prom_data);
if(ret<0)
{
perror("ioctl error1");
}
sleep(1);
/******read data from e2prom*******/
e2prom_data.nmsgs=2;
(e2prom_data.msgs[0]).len=1; //e2prom Ŀ�˔����ĵ�ַ
(e2prom_data.msgs[0]).addr=0x50; // e2prom �O���ַ
(e2prom_data.msgs[0]).flags=0;//write
(e2prom_data.msgs[0]).buf[0]=0x10;//e2prom������ַ
(e2prom_data.msgs[1]).len=1;//�x���Ĕ���
(e2prom_data.msgs[1]).addr=0x50;// e2prom �O���ַ
(e2prom_data.msgs[1]).flags=I2C_M_RD;//read
(e2prom_data.msgs[1]).buf=(unsigned char*)malloc(1);//��ŷ���ֵ�ĵ�ַ��
(e2prom_data.msgs[1]).buf[0]=0;//��ʼ���x���_
ret=ioctl(fd,I2C_RDWR,(unsigned long)&e2prom_data);
if(ret<0)
{
perror("ioctl error2");
}
printf("buff[0]=%x\n",(e2prom_data.msgs[1]).buf[0]);
/***��ӡ�x����ֵ���]�e��Ԓ���͑�ԓ��ǰ�挑��0x58��***/
close(fd);
return 0;
}
�����v����һ�N���^���õ�����i2c-dev.c����i2c�O��ķ������@�N���������f���ڑ��Ì�����ˌ����wi2c�O����ӹ�����
Ӌ����һƪ���Y�����c��
��1���ڃȺ��i2c�O���ӵăɷN��ʽ��
�� Probe��ʽ��new style�����磺
static struct i2c_driver pca953x_driver = {
.driver = {
.name = "pca953x",
},
.probe = pca953x_probe,
.remove = pca953x_remove,
.id_table = pca953x_id,
};
�� Adapter��ʽ��LEGACY�����磺
static struct i2c_driver pcf8575_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "pcf8575",
},
.attach_adapter = pcf8575_attach_adapter,
.detach_client = pcf8575_detach_client,
};
��2���m�����Ӿ�������
��3������һЩ�Ŀ�������Ć��}
ϣ����Ҷ�����Ҋ����ཻ����










