 RTLinux�Ľ�B
�r�g��2018-08-16 ��Դ��δ֪
RTLinux�Ľ�B
�r�g��2018-08-16 ��Դ��δ֪
�� RTLinux����������ī�����ݵ�fsmlabs(finite state machine labs, ���ޠ�B�C�����)��˾�_�l�ġ�����linux�_�l�����r��Ƕ��ʽ���õIJ���ϵ�y����rtlinux�����У��@������rtlinux �� rtlinux is the hard realtime variant of linux that makes it possible to control robots, data acquisition systems, manufacturing plants, and other time-sensitive instruments and machines��
��Ŀǰ��ֹ��RT-Linux�ѽ��ɹ��ؑ����ں����w�C�Ŀ��g�����ɼ����ƌW�x���y�غ��Ӱ�ؼ��D��̎���ȏV���I������š����I�Ԅӻ��ͺ��պ���Ȍ��r�I��Ҳ�г��쑪�á��S����Ϣ���g���w�ٰlչ�����rϵ�y�ѽ��B���ճ�����ĸ������棬�������y�Ĕ����I��܊�¡�����I��ͨ�ŘI�������B���������Ϣ��늡�ý�w�V��ϵ�y�͔���Ӱ���O�䶼�����r��������������ߵ�Ҫ��
RT-Linux�_�l�߲��]��ᘌ����r����ϵ�y�����Զ��،�Linux�ăȺˣ�����@�����Ĺ������dz�����Ҫ���C������Ҳ�dz����y����linux�ăȺ˴��a��һЩ�ģ���linux�������΄��Լ�linux�Ⱥ˱�������һ�����ȼ��ܵ͵��΄գ������r�΄����郞�ȼ��ߵ��΄ա����ڌ��r�΄մ��ڵ���r���\�Ќ��r�΄գ���t���\��linux�������΄ա�TRLinux�܉����_�\�еķ���POSIX.1b�˜ʵČ��r�M�̣���������һ�N��ѭGPL v2�f�h���_��ܛ���������_GPL v2�f�h�S�ɷ��������ɵء����M��ʹ�á��ĺ��ٰl����
����Linux�ڌ��r�Է���ĔUչ�������ѫ@�Ì������p�˼��g:һ���͵�RTLinux�Ⱥ˰�ԭʼ��Linux�Ⱥ��������ڿ��e�r��һ�����́��\�С��@�_�����ڃɂ���ͬ�ăȺˌ����ϨD�D���r��RTLinux�Ⱥ˺ͳ��õģ��nj��r��Linux�Ⱥ˨D�D�\�в�ͬ������·�ʽ��ԭʼ��Linux�Ⱥ�ͨ�^RTLinux�Ⱥ��L��Ӳ�����@�ӣ�����Ӳ�����H�϶�����RTLinux���M�й����ġ�Ŀǰ���ЃɷN��ͬ��RTLinux�汾��RTLinux/Free(����RTLinux/Open)��RTLinux/Pro. RTLinux/Pro��һ����FSMLabs�_�l����ȫ�̘I�汾�Č��rlinux��RTLinux/Free��һ������^�_�l���_Դ�汾��
2.�˜�LinuxӰ푌��r�ԵęC��
�F�е�Linux��һ��ͨ�õIJ���ϵ�y���mȻ���������S�༼�g�����ϵ�y���\�кͷ����ٶȣ��������|�ϲ���һ�����r����ϵ�y��������Ƕ��ʽ�h����߀�����T��IJ��㡣���w���F���£�
1.�P�����}
��ϵ�y�{���У����˱��o�R��^�YԴ��Linux̎�ڃȺ��R��^�r���Д�����ϵ�y���Σ��@����ζ�������ǰ�M����̎���R��^����ʹ���ă��ȼ��^�ͣ�Ҳ�����t�߃��ȼ����Д�Ո���ڌ��r�����У��@��һ��ʮ�և��صĆ��}��
2.�M���{�Ȇ��}
Linux���ؘʵ�UNIX���gʹ�ÃȺ��Dz��ɓ�ռ�ġ����û��ڹ̶��r�gƬ�Ŀ�׃���ȼ��{�ȣ���Փ�M�̵ă��ȼ���ô�ͣ�Linux������ij���r��ֽoԓ�M��һ���r�gƬ�\�У���ʹͬ�r�п����\�еĸ߃��ȼ��M�̣���Ҳ��횵ȴ��̓��ȼ��M�̵ĕr�gƬ���꣬�@��һЩҪ��߃��ȼ��M��������ռCPU�Č��r�����Dz��ܝM��Ҫ��ġ�
3.�r犆��}
Linux�������ϵ�y��ƽ�������ʣ����r��Д��С�g���O�Þ�10ms���@����һ�������ԵČ��r�΄գ��g��Ҫ��С��10ms�r���Ͳ��ܝM�㌍�r�΄յ���Ҫ�����Ҫ�ѕr� ���g����С�ԝM�������ԵČ��r�΄յ���Ҫ������Linux���M���ГQ���^�M�r���r��Д�Խ�l�����������Д�̎���ϵĕr�g��Խ��,ϵ�y�Ĵ֕r�g���{���M���{�ȳ����M���M���{�ȶ������M��������̎����
3.RTLinux�����c
��Linux ����ϵ�y�У��{���㷨�����ڴ��������ʄt�����O���ӡ������Д��ϵ�y�{�á��Д������Լ�̓�M�ȴ��ʹ�õ����أ���������ϵ�y�ڕr�g�ϵIJ����A�y�ԣ��Q����Linux����ϵ�y����̎��Ӳ���r�΄ա�RTLinux������@Щ���}����Linux�Ⱥ��cӲ��֮�g������һ��̓�M�ӣ�ͨ���Q��̓�M�C����������һ��С�ġ��r�g�Ͽ��A�y�ġ��cLinux�Ⱥ˷��_�Č��r�Ⱥˣ�ʹ���������\�еČ��r�M�̝M��Ӳ���r�ԡ�����RTLinux��Linux����һ���������w���܉���ɼȰ������r�����ְ����nj��r���ֵď��s�΄ա�
4.RTLinux���F�C��
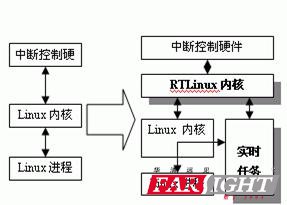
RT-Linux��Linux�Ⱥ��M�и��죬��Linux�Ⱥ˹����h������һЩ׃������D1��ʾ��
�D1 RTLinux��Linux�Ⱥ˸�׃
RTLinux�ЃɷN�ДࣺӲ�Д��ܛ�Дࡣܛ�Д��dz�ҎLinux�Ⱥ��Дࡣ���ă��c���ڿɟo���Ƶ�ʹ��Linux�Ⱥ��{�á�Ӳ�Д��ǰ��b���rLinux��ǰ�ᡣ��ه�ڲ�ͬ��ϵ�y�����rLinux��Ӳ�Д�����t��15μs��
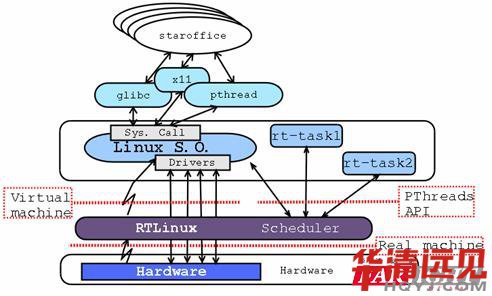
����Linux�Ⱥ˵��ӌ��F��һ�����εČ��r�Ⱥ�,��Linux���������@�����r�Ⱥ˵ă��ȼ��͵��΄�,���еČ��r�΄յă��ȼ�������Linuxϵ�y�������Լ�Linuxϵ�y�µ�һ���΄ա�RTLinux���wϵ�Y����D2��ʾ��
�D2 RTLinux���wϵ�Y��
RTLinux���OӋ˼����:����Ӳ���Č��r�s�������r����ָ�ɶ�С���εIJ���,�^�ֳГ��^���s���΄ա������@һԭ�t,�����ó���֞�Ӳ���r��ܛ���r��������2�����֡�
Ӳ���r�Č��F:
Ӳ�����r���ֱ����錍�r�΄Ձ����,�����ⲿ�O�俽ؐ������һ���������r�����ܵ�(RTFIFO)������I/O�˿�;������Ҫ��������˜�Linux�M�́���С�������RTFIFO���xȡ����,Ȼ���@ʾ���惦���ļ���,���r����������Ⱥˡ��OӋ���r�����ܵ��Ǟ���ʹ���r�΄����x�͌������r�����������D3��ʾ����RTFIFO�Y���D��
�D3 RT-FIFO�Y���D
RTLinux���˜�Linux�Ⱥ����麆�Ό��r����ϵ�y��RTOS��������ӃȺˣ���ș�͵ľ��́��\�У��Ķ����_��Linux�Ⱥ����ܵĆ��}�� �ĈD3���Կ�����RTLinux���Ѓɂ��Ⱥˡ��@����ζ���ЃɽM�Ϊ���API��һ������Linux�h������һ�����ڌ��r�h�������⣬�鱣�C���r�M���c�nj��rLinux�M�̲�����M�Д������Q��RTLinux������RT-FIFO��С�RT-FIFO��Linuxҕ���ַ��O�䣬����_150�����քe������/der/rtf0��/dev/rtf1……/dev/rtf63�����RT-FIFO������ϵ�y�Ⱥ˾��g�r�O����
RTLinux�����\�����Ñ����g�̓ȺˑB�ɂ����g��RTLinux�ṩ�ˑ��ó���ӿڡ������@ЩAPI���������r̎�����־����ɃȺ�ģ�K�����b�d��RTLinux�Ⱥ��У��\����RTLinux�ăȺˑB���nj��r���ֵđ��ó���t��Linux�µ��Ñ����g�Ј��С��@�ӿ��l�]Linux���W�j�͔�����ď���֧�ֹ��ܡ�
ܛ���r�Č��F:
RTLinuxͨ�^һ����Ч�ġ��ɓ��ȵČ��r�{�Ⱥ��ā�ȫ��ӹ��Д࣬����Linux����ˌ��r���ĵ�һ�����ȼ��͵��M���\�С����Ќ��r�΄���Ҫ̎��r��RTLinux�\�Ќ��r�΄գ��o���r�΄Օr��RTLinux�\��Linux�ķnj��r�M�̡���ϵ�y�Y��Ҋ�D1��
�D4 RTLinuxϵ�y�Y���D
��Linux�M�̺�Ӳ���Д�֮�g,������Linux�Ⱥ���ȫ����,�F����Linux�Ⱥ˺�Ӳ���Д�ĵط�������һ��RTLinux�Ⱥ˵Ŀ��ơ�Linux�Ŀ�����̖��Ҫ�Ƚ��oRTLinux�Ⱥ��M��̎������RTLinux�Ⱥ��Ќ��F��һ��̓�M�Д��C��,Linux�������h���������Д�,���l�����Д�������̖�ʹ��_�Д���̖���ij���RTLinux�l��һ����̖������Linux����ʹ��“SI”��“CLI”��ָ��,RTLinux�����ijЩ��ӛ�����ġ�Ҳ�����f�����е��Д�ֳ�Linux�Д�͌��r�Д�������RTLinux�Ⱥ˽��յ����Д���̖����ͨLinux�Д�,�Ǿ��O��һ����־λ;����nj��r�Д�,���^�m��Ӳ���l���Дࡣ��RTLinux�Ј���STI���Д���_֮��,��Щ�O���˘�־λ��ʾ��Linux�Д���^�m����,���,CLI�����ܽ�ֹRTLinux�Ⱥ˵��\��,�s�����Á��Д�Linux��Linux�����Д��Լ�,��RTLinux���ԡ�
RTLinux��Ĭ�J����r�²��Ã��ȼ����{�Ȳ��ԣ���ϵ�y�{���������������r�΄յă��ȼ����_�����е��Ⱥ�����ȼ��ߵ��Ȉ��У����ȼ��͵ĺ���У��@�Ӿͱ��C�ˌ��r�M�̵�Ѹ���{�ȡ�ͬ�rRTLinuxҲ֧���������{�Ȳ��ԣ���̕r�����{�ȣ�EDP�����_�������{�ȣ�RM�������ڶεČ��r�΄վ��иߵă��ȼ�����RTLinux���΄��{���������OӋ��һ�����b�d�ăȺ�ģ�K���Ñ����Ը����Լ��Č��H��Ҫ�������m���Լ����{���㷨��
����һ������ϵ�y���ԣ����_�Ķ��r�C���mȻ��������΄��{������Ч�ʣ���������CPU̎�����r�Д�ĕr�g�_�N��RTLinux���r�g���Ⱥ͕r��Д�̎���ĕr�g�_�N�M�������п��]��������Linux�ǘӌ�8254���r���OӋ��10ms�a��һ�ζ��r�Д�Ĺ̶�ģʽ�����nj����r��оƬ�O�Þ�K��Ӌ�r�Дʽ�����������M�̵ĕr�g��Ҫ�������{�����r���Ķ��r�g�����@�Ӳ��H���ԫ@�ø߶��r���ȣ�ͬ�r�Д�̎�����_�N��С��
5.RTLinux����Ҫ����
RTLinux�ṩ��һ����Ӳ���r�M�̵�֧�ֺ��������ڴˣ�����Ƕ��ʽϵ�y�еČ��F�����U����
a.�����
���Д����Ӳ���cLINUX����֮�g����һ��ܛ������ӡ����w�����ǣ���LINUXԴ�a�г��Fcli��sti��iret�����еط����÷���꣺S_CLI��S_STI��S_IRET����Q�����е�Ӳ���Д�Ͷ������������ث@��
����Ҫ�P�Д��r���͌��������е�һ��׃����0����Փ�Εr�����Д�l�����������͙z���@��׃���������1��LINUX���_�Дࣩ���������{��LINUX���Д�̎������t��LINUX�Д౻��ֹ���Д�̎���������{�ã������ڱ��������В����Д����Ϣ��׃��������λ��1����LINUX�����_�Д࣬���В����Д��̎�����������С��@�N���淽ʽ���ԷQ֮��"ܛ�Д�"��
b.���r�΄�
���r�΄�����һ���ɺ��Ŀ��Ƶ��{�ȳ�����{�����е��Ñ����x�ij���
RT-LINUX�������r�΄��OӋ��ELF��ʽ��Ŀ���ļ����@һ�OӋ�����Ĵ�ȱ�c�������ܱ��^�ԭ�����ڣ���һ��486�ľ�����̓�M�ġ�����ÿ��퓱�Ŀ䛵Ļ�ַ�Ĵ�����׃�r��TLB���D�Q��侏�_�����͕�ʧЧ�����ڌ��r�΄յ��������D�Q�l��������TLB���l��ʧЧ�͌���ϵ�y���ܵć����½����ڶ���486�ı��o���e׃�Q�ĕr���١����磬��������e�r��Ҫ71��ѭ�h��������ָ��һ������10��ѭ�h��
��Q���k������ʹ�ÿɼ��dģ�M���g�����еČ��r�΄ն�ͬ̎��һ����ַ���g-�Ⱥ˵�ַ���g�����H�������l����TLBʧЧ��ͬ�rҲ������׃�Q���o���e�����ģ������΄��D�QҲ׃���ஔ���ס�
c.�M���{��
���rϵ�y���M���{�ȵ���Ҫ�΄վ��ǝM�㌍�r�΄��ڕr�g�ϵ�Ҫ���{���㷨�ķNܶ࣬�]��һ�������Ƿ�֮�ĺ����Ԝʵģ���˲����ķN�㷨Ҫȡ�Q�ھ��w���á�
RT-LINUX���õķ��������S�Ñ������Լ����{�ȳ������Ծ��g��ģ�M����ʽ���@�ӾͿ��Է����ԇͬ�IJ��Ժ��㷨����ijһ�ض����õ��m���ԣ������x������
RT-LINUX�Ԏ�����һ�����ڃ��Ȕ��ē�ռʽ�{�ȳ����{�ȳ���LINUX�������е̓��Ȕ��Č��r�΄ա���ˣ�LINUXֻ�ڌ��rϵ�y�o�κΌ��r�΄��Dz��\�С��ڏ�LINUX�ГQ�����r�΄Օr��ϵ�yӛ��ܛ�Д�Ġ�B����ֹܛ�Дࡣ���ГQ�팍���ٻ֏�ܛ�Д�Ġ�B��
d.�r�
�{�ȳ�����Ҫ���_�ĕr犲��ܜʴ_�������{��ͨ�������ض��ĕr���M���΄��ГQ���r犵�ƫ��������A���{�ȵ�ƫ����®a�����Q���΄հl�����ӵĬF���@��һ�N��ԓ�M������IJ����F��
RT-LINUX�Ľ�Q�k���ǣ���IBM PC���ݙC�еĕr�оƬIntel 8254�O�Þ��Д��_���K��Ӌ��ģʽ�����@�Nģʽ�£����ȿ����_��1���롣�@���ڽ����Д�̎����Ӱ푵�ͬ�r���@�����^�ߵĕr犾��ȡ�
���ژ˜�LINUX���Ŀ��Ա����r�΄�������r�̓�ռ�����Ԍ��r�΄՟o����ȫ���{��LINUX�ij����ǿ�Ҫ��һ����Ϣ���Q�ęC�ơ�
��RT-LINUX�����õ���Ϣ���Q��ʽ��RT-FIFO�����r��У������cUNIX�Ĺܵ��dz����ƣ�����һ���o�Y���Ĕ�������ͨ�^RT-FIFO��LINUX���M��֮�g�����r�M��֮�g���Լ�LINUX�ĺ����c���r�M��֮�g���Խ��Q��Ϣ��
����һ����ͨ���M�́��f��RT-FIFO����һ��������ַ��ļ����@Щ�ļ�����Խ���
# for i in 0 1 2 3; do mknod /dev/rtf$i c 63 $i; done




