 ����wifiС܇- SG90��C��
�r�g��2018-09-21 ��Դ��δ֪
����wifiС܇- SG90��C��
�r�g��2018-09-21 ��Դ��δ֪
SG90��C�Ӻ���
��C��һ�Nλ��(�Ƕ�)�ŷ����������m������Щ��Ҫ�ǶȲ���׃�������Ա��ֵĿ���ϵ�y���ڔz���^���_�У��҂�ʹ���˃ɂ�SG90��C��
��C�Ĺ���ԭ���ǣ�������̖�ɽ��ՙC��ͨ���M����̖�{��оƬ���@��ֱ��ƫ��늉������Ȳ���һ�������·���a�����ڞ�20ms�����Ȟ�1.5ms�Ļ�����̖�����@�õ�ֱ��ƫ��늉��c�λ����늉����^���@��늉���ݔ������늉������ؓݔ����늙C��оƬ�Q��늙C�������D����늙C�D��һ���r��ͨ�^���p���X݆�����λ�����D��ʹ��늉����0��늙Cֹͣ�D�ӡ���Ȼ�҂����Բ���ȥ�˽����ľ��w����ԭ����֪�����Ŀ���ԭ���͉��ˡ������҂�ʹ�þ��w��һ�ӣ�֪���������������_�P�ܻ�Ŵ�ܾ����ˣ����ڹ܃ȵ���Ӿ��w��ô�����ǿ�����ȫ����ȥ���]�ġ�
��C�Ŀ���һ����Ҫһ��20ms���ҵĕr���}�_��ԓ�}�_�ĸ��ƽ����һ���0.5ms~2.5ms�����ȵĽǶȿ����}�_���֡���180�ȽǶ��ŷ�(SG90)��������ô�����Ŀ����Pϵ���@�ӵģ�
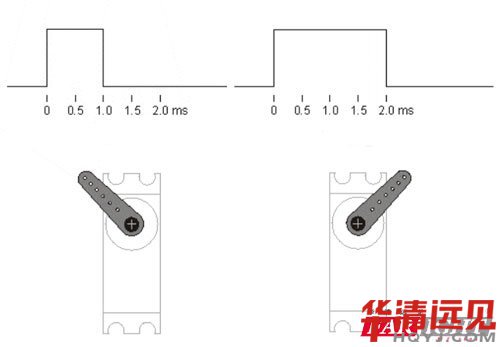
0.5ms-------------0��;
1.0ms------------45��;
1.5ms------------90��;
2.0ms-----------135��;
2.5ms-----------180��;
SG90�Ӿ����t - ������ - ؓ���� - ��̖
STM32CubeMX����
ʹ��TIM33��ͨ��1��2�M�п��ơ�
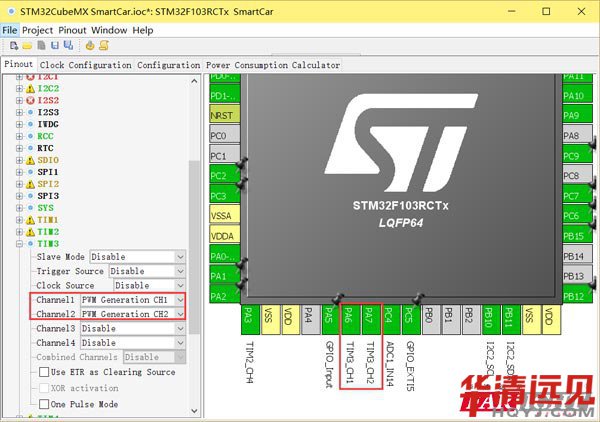
PWM����

PWM���ڞ�19.8ms�����O��ͨ��Pulseֵ��45-225֮�g�r�a�����}�_������0.5ms~2.5ms������Pulse���Ȅ��Þ�180�������{ֵ��
Դ�a
#include "pwm.h"
#include "oled.h"
extern TIM_HandleTypeDef htim2;
extern TIM_HandleTypeDef htim3;
void Change_Pulse(uint16_t left,uint16_t right)
{
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2, left);
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_4, right);
uint8_t speed[3]={32,32,'%'};
speed[0]=left/100+'0';
speed[1]=(left%100)/10+'0';
OLED_ShowStr(48,5,speed,2);
speed[0]=right/100+'0';
speed[1]=(right%100)/10+'0';
OLED_ShowStr(80,5,speed,2);
}
void Change_Pulse_Left(uint16_t left)
{
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2, left);
uint8_t speed[3]={32,32,'%'};
speed[0]=left/100+'0';
speed[1]=(left%100)/10+'0';
OLED_ShowStr(48,5,speed,2);
}
void Change_Pulse_Right(uint16_t right)
{
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_4, right);
uint8_t speed[3]={32,32,'%'};
speed[0]=right/100+'0';
speed[1]=(right%100)/10+'0';
OLED_ShowStr(80,5,speed,2);
}
void Change_Pulse_Rudder1(uint16_t angle)
{
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1, angle);
}
void Change_Pulse_Rudder2(uint16_t angle)
{
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_2, angle);
}




