Thumb ����ģ��
�r�g��2018-09-21 ��Դ��δ֪
Thumb ����ģ��
�r�g��2018-09-21 ��Դ��δ֪
���е� Thumb ָ���16 λ�ġ���������ARM ָ�����¾��a�õ��ģ������^����ARM ָ����S��
���c:
�� �Д���̎�����������ͺ������Ƶ�ָ��Y����
�� ֧��8 λ�ֹ���16 λ���ֺ�32 λ�֔�����ͣ������ԃ��ֹ�߅�猦�R������4 �ֹ�߅�猦�R��
�� 32 λ�ğo�ֶδ惦��(unsegmented memory)��
Thumb ָ������^����ARM ָ���һЩ���c�⣬�cARM ָ���������һЩ���
�� �����Thumb ָ���o�l������ָ��(����ARM ָ��Ǘl�����е�)��
�� �S��Thumb ����̎��ָ�������2 ��ַ��ʽ(Ŀ�ļĴ����cԴ�Ĵ�����ͬ)����ARM ָ���г�64 λ �˷�ָ���⣬����ָ�������3 ��ַģʽ��
�� Thumb ָ���ʽ�p���˺ܶ�ARM ָ���ʽ�����ƣ�ʹThumb ָ����Ĵ��a�ܶȴ����ߡ�
�oՓ̎����̎��ʲô��B�����еĮ�����ʹ̎�������ص�ARM ��B������ɮ���̎�����������l���r�� CPSR ��B�Ĵ������M�뮐���r�����浽������SPSR �У�������̎���Y����̎�������֏͵������l�� ǰ�Ġ�B�������հl�������r̎�����Ġ�B�^�m����ARM ��Thumb ָ�
��ԓע����ǣ�ARM ��������ָ����Ҫ����ARM ��ˮ�����О錦���ص�ַ�M���{��������Thumb ָ�� ��2 �ֹ��L����ARM ָ����4 �ֹ��L��������Thumb ���Р�B�M�뮐���r����Ȼƫ�������cARM ��ͬ (ARM ��B�£���ؐ��朽ӼĴ�����ֵPC-4)�����˜p�پ��̵ď��s�ԣ�ARM �wϵ�Y�����O����Ӳ�� ߉���Ԍ��FThumb ��B���Ԅӵ�ַƫ���{����ʹARM ��Thumb ��B����һ�¡�
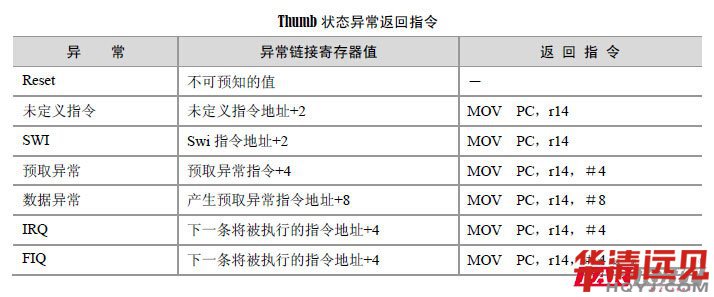
�����г���Thumb ��B�°l�������rLR ��ֵ��