 Linux�Ⱥ˵ė������c����
�r�g��2019-04-02 ��Դ���A���hҊ
Linux�Ⱥ˵ė������c����
�r�g��2019-04-02 ��Դ���A���hҊ
linux�Ⱥ��{ԇ�rLinux�ӹ��̎��ı似�ܣ����Ⱥ˳��F���^���ص��e�`�r������Oops�e�`���߃Ⱥ��J��ϵ�y�\�Р�B�������Ⱥ˾͕���ӡ����ǰ�M�̵ė�������Ϣ�����а�����ǰ���д��a��λ���Լ�������ָ��a���e�`��ԭ���P�I�Ĵ�����ֵ�Լ������{���Pϵ����Ϣ���@Щ��Ϣ�����{ԇ�Ⱥ��e�`�dz����á�
ʾ����
ע����ʾ������Linux-3.14.0�ăȺˣ�ƽ�_��FS4412
�����˞�����Ⱥ��e�`����drivers/net/ethernet/davicom/dm9000.c����dm9000_probe�ĺ����������Լ�����Ϣ��
���磬�� 1450�У������O���֮����Ո�����YԴ�ք��xֵ��NULL�����£�
1440 db->addr_res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
1441 db->data_res = platform_get_resource(pdev, IORESOURCE_MEM, 1);
1442 db->irq_res = platform_get_resource(pdev, IORESOURCE_IRQ, 0);
1443
1444 if (db->addr_res == NULL || db->data_res == NULL ||
1445 db->irq_res == NULL) {
1446 dev_err(db->dev, "insufficient resources\n");
1447 ret = -ENOENT;
1448 goto out;
1449 }
1450 printk("db->addr_res :%#x.\n",db->addr_res); //�ք����������д�ӡ��Ϣ
1451 printk("db->data_res :%#x.\n",db->data_res);
1452 printk("db->irq_res :%#x.\n",db->irq_res);
1453 db->addr_res = NULL; //�քӽo��Ո�����YԴ�ĵ�ַ�xֵ��NULL
��ע�� �O�����Ϣ���£�
srom-cs1@5000000 {
compatible = "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
reg = <0x5000000 0x1000000>;
ranges;
ethernet@5000000 {
compatible = "davicom,dm9000";
reg = <0x5000000 0x2 0x5000004 0x2>;
interrupt-parent = <&gpx0>;
interrupts = <6 4>;
davicom,no-eeprom;
mac-address = [00 0a 2d a6 55 a2];
};
};
��ô�����҂����g�Ⱥ˺��O���Ȼ��ؐ���ӃȺˣ�
$ make uImage
$ make dtbs
ϵ�y���ӕr�ăȺ˴�ӡ��Ϣ���£�
[ 5.075000] brd: module loaded
[ 5.085000] loop: module loaded
[ 5.090000] db->addr_res :0xee927e80. //�@�����҂��ք����ӵĴ�ӡ��Ϣ����ӡ֮������҂��ăȺ�Oops��Ϣ
[ 5.090000] db->data_res :0xee927e9c.
[ 5.095000] db->irq_res :0xee927eb8.
[ 5.100000] Unable to handle kernel NULL pointer dereference at virtual address 00000000
[ 5.105000] pgd = c0004000
[ 5.110000] [00000000] *pgd=00000000
[ 5.115000] Internal error: Oops: 5 [#1] PREEMPT SMP ARM
[ 5.115000] Modules linked in:
[ 5.115000] CPU: 0 PID: 1 Comm: swapper/0 Not tainted 3.14.0 #15
[ 5.115000] task: ee8c0000 ti: ee8be000 task.ti: ee8be000
[ 5.115000] PC is at dm9000_probe+0x254/0x900
[ 5.115000] LR is at dm9000_probe+0x204/0x900
[ 5.115000] pc : [<c029bb7c>] lr : [<c029bb2c>] psr: a0000153
[ 5.115000] sp : ee8bfe50 ip : 00000003 fp : 00000000
[ 5.115000] r10: 00000000 r9 : c05f94d0 r8 : ee0a7150
[ 5.115000] r7 : ee9d0200 r6 : ee9d0210 r5 : eead5c80 r4 : eead5800
[ 5.115000] r3 : 00000000 r2 : 00000003 r1 : 00000000 r0 : fffffffa
[ 5.115000] Flags: NzCv IRQs on FIQs off Mode SVC_32 ISA ARM Segment kernel
[ 5.115000] Control: 10c5387d Table: 4000404a DAC: 00000015
[ 5.115000] Process swapper/0 (pid: 1, stack limit = 0xee8be240)
[ 5.115000] Stack: (0xee8bfe50 to 0xee8c0000)
[ 5.115000] fe40: ee0a6f78 00000001 c05f94d0 ee0a8048
[ 5.115000] fe60: 00000000 ee9d0210 c062a554 ee9d0210 00000000 c062a554 c05f94d0 c05c14fc
[ 5.115000] fe80: 00000000 c026b2e4 c026b2cc c067478c c062a554 c02699d0 ee9d0210 c062a554
[ 5.115000] fea0: ee9d0244 00000000 c05da4f4 c0269b6c c062a554 c0269ae0 00000000 c0268324
[ 5.115000] fec0: ee804c78 ee927dc0 c062a554 ee072780 c06286d8 c0269190 c0548ae0 c062a554
[ 5.115000] fee0: 00000000 c062a554 00000000 c05e5c74 c063a5c0 c026a184 00000000 ee8be000
[ 5.115000] ff00: 00000000 c00087b4 ee90ef00 c065f090 60000153 c0609c40 60000100 c0609c40
[ 5.115000] ff20: 00000000 00000000 c0609c3c 00000000 c0599df0 ef7fc8bd 0000009f c0034c6c
[ 5.115000] ff40: c0550640 c0599400 00000006 00000006 00000000 c05e5c90 c05e5c94 00000006
[ 5.115000] ff60: c05e5c74 c063a5c0 0000009f c05c14fc 00000000 c05c1c4c 00000006 00000006
[ 5.115000] ff80: c05c14fc c003e0dc 00000000 c040f808 00000000 00000000 00000000 00000000
[ 5.115000] ffa0: 00000000 c040f810 00000000 c000e4b8 00000000 00000000 00000000 00000000
[ 5.115000] ffc0: 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000
[ 5.115000] ffe0: 00000000 00000000 00000000 00000000 00000013 00000000 ff7fffff ffdfdfff
[ 5.115000] [<c029bb7c>] (dm9000_probe) from [<c026b2e4>] (platform_drv_probe+0x18/0x48)
[ 5.115000] [<c026b2e4>] (platform_drv_probe) from [<c02699d0>] (driver_probe_device+0x100/0x210)
[ 5.115000] [<c02699d0>] (driver_probe_device) from [<c0269b6c>] (__driver_attach+0x8c/0x90)
[ 5.115000] [<c0269b6c>] (__driver_attach) from [<c0268324>] (bus_for_each_dev+0x58/0x88)
[ 5.115000] [<c0268324>] (bus_for_each_dev) from [<c0269190>] (bus_add_driver+0xd8/0x1cc)
[ 5.115000] [<c0269190>] (bus_add_driver) from [<c026a184>] (driver_register+0x78/0xf4)
[ 5.115000] [<c026a184>] (driver_register) from [<c00087b4>] (do_one_initcall+0x30/0x144)
[ 5.115000] [<c00087b4>] (do_one_initcall) from [<c05c1c4c>] (kernel_init_freeable+0xfc/0x1c8)
[ 5.115000] [<c05c1c4c>] (kernel_init_freeable) from [<c040f810>] (kernel_init+0x8/0xe4)
[ 5.115000] [<c040f810>] (kernel_init) from [<c000e4b8>] (ret_from_fork+0x14/0x3c)
[ 5.115000] Code: e59f1640 ebff2c17 e59434b4 e3a0a000 (e8930202)
[ 5.395000] ---[ end trace cbd2f1e374620c53 ]---
[ 5.400000] Kernel panic - not syncing: Attempted to kill init! exitcode=0x0000000b
[ 5.400000]
������
1���Լ����ӵăȺ˴�ӡ��Ϣλ�ã�
[ 5.090000] db->addr_res :0xee927e80. //�@�����҂��ք����ӵĴ�ӡ��Ϣ����ӡ֮������҂��ăȺ�Oops��Ϣ
[ 5.090000] db->data_res :0xee927e9c.
[ 5.095000] db->irq_res :0xee927eb8.
2���Ⱥ�Oops��Ϣ
��ָᘮ�����ɵ��e�`---�ܳ�Ҋ
[ 5.100000] Unable to handle kernel NULL pointer dereference at virtual address 00000000
[ 5.105000] pgd = c0004000
[ 5.110000] [00000000] *pgd=00000000
[ 5.115000] Internal error: Oops: 5 [#1] PREEMPT SMP ARM
3���Ĵ�����Ϣ���P�IPCָᘵ�ֵ
[ 5.115000] CPU: 0 PID: 1 Comm: swapper/0 Not tainted 3.14.0 #15
[ 5.115000] task: ee8c0000 ti: ee8be000 task.ti: ee8be000
[ 5.115000] PC is at dm9000_probe+0x254/0x900
[ 5.115000] LR is at dm9000_probe+0x204/0x900
[ 5.115000] pc : [<c029bb7c>] lr : [<c029bb2c>] psr: a0000153
[ 5.115000] sp : ee8bfe50 ip : 00000003 fp : 00000000
[ 5.115000] r10: 00000000 r9 : c05f94d0 r8 : ee0a7150
[ 5.115000] r7 : ee9d0200 r6 : ee9d0210 r5 : eead5c80 r4 : eead5800
[ 5.115000] r3 : 00000000 r2 : 00000003 r1 : 00000000 r0 : fffffffa
[ 5.115000] Flags: NzCv IRQs on FIQs off Mode SVC_32 ISA ARM Segment kernel
[ 5.115000] Control: 10c5387d Table: 4000404a DAC: 00000015
[ 5.115000] Process swapper/0 (pid: 1, stack limit = 0xee8be240)
��ǰ�����r�����\����CPU0�ϵ��΄����l�Į�������ô�����ϣ�����ٶ�λ�e�`��Ϣ����ôֻ��Ҫ�@ȡPCָ����ڵĺ�����PCָ�ָ��ĵ�ַ�Ϳ����ˣ��������£�
[ 5.115000] PC is at dm9000_probe+0x254/0x900
[ 5.115000] pc : [<c029bb7c>]
���ٶ�λ�� ��Linux�Ⱥ˵�플�Ŀ�����һ�����ɵ�δ���s�ăȺ�vmlinux�����R�����_����
arm-none-linux-gnueabi-objdump -D vmlinux > vmlinux.dis
�ļ� vmlinux.dis �dz�����_��Ҫһ���r�g�� �ķ��R�����a��λ�� C ���a������������ף���Ҫ���^������x�R�����a�������� ����͡�
����һ�N������ͨ�^ addr2line ȥ��λ
����朽ӣ�//elinux.org/Addr2line_for_kernel_debugging
$ arm-none-linux-gnueabi-addr2line -f -e vmlinux c029bb7c•
4����������Ϣ
��������Ϣ�Ǐ������Ͽ���
[ 5.115000] [<c029bb7c>] (dm9000_probe) from [<c026b2e4>] (platform_drv_probe+0x18/0x48)
[ 5.115000] [<c026b2e4>] (platform_drv_probe) from [<c02699d0>] (driver_probe_device+0x100/0x210)
[ 5.115000] [<c02699d0>] (driver_probe_device) from [<c0269b6c>] (__driver_attach+0x8c/0x90)
[ 5.115000] [<c0269b6c>] (__driver_attach) from [<c0268324>] (bus_for_each_dev+0x58/0x88)
[ 5.115000] [<c0268324>] (bus_for_each_dev) from [<c0269190>] (bus_add_driver+0xd8/0x1cc)
[ 5.115000] [<c0269190>] (bus_add_driver) from [<c026a184>] (driver_register+0x78/0xf4)
[ 5.115000] [<c026a184>] (driver_register) from [<c00087b4>] (do_one_initcall+0x30/0x144)
[ 5.115000] [<c00087b4>] (do_one_initcall) from [<c05c1c4c>] (kernel_init_freeable+0xfc/0x1c8)
[ 5.115000] [<c05c1c4c>] (kernel_init_freeable) from [<c040f810>] (kernel_init+0x8/0xe4)
[ 5.115000] [<c040f810>] (kernel_init) from [<c000e4b8>] (ret_from_fork+0x14/0x3c)
[ 5.115000] Code: e59f1640 ebff2c17 e59434b4 e3a0a000 (e8930202)
[ 5.395000] ---[ end trace cbd2f1e374620c53 ]---
�M���������x�ߌ������ݵĹ������ڌ��H�Ŀ�{ԇ�������ݵĹ��ܺ���
��ӡ�����{���Pϵ�ĺ�������dump_stack()��ԓ�������H��������ϵ�y�����}�ĕr���҂����{ԇ�Ⱥ˵ĕr����ͨ�^dump_stack()�����Ĵ�ӡ��Ϣ��������˽�Ⱥ˴��a�������̡�
start_kernel-->rest_init--->kernel_thread(kernel_init,xxx)--->kernel_init--->kernel_init_freeable--->do_one_initcall--->driver_register--->bus_add_driver--->bus_for_each_dev--->__driver_attach--->driver_probe_device--->platform_drv_probe---->dm9000_probe
�S���Ⱥˆ��ӣ�����ϵ�y���P�ĺ��IJ��ֵij�ʼ��������CPU,�r犣��ȴ�ȣ�Ȼ��̫��Ҫ�ij�ʼ�������ŵ�rest_init�ij�ʼ�����У�����_���Ⱥ˵ĵ�һ���Ⱥ˾���kernel_init���ڃȺ˳�ʼ�����̮��Е�ȥ���dLinux�µIJ�ͬ�Ķή��еă��ݣ������ӵij�ʼ���{��do_one_initcall�����ӱ���ʼ���r����Ҫ�������ӵ���������朱�����driver_register��Ȼ���ӷŵ������Ŀ����ϣ���ǰ������dm9000����platform�O�係����bus_add_driver��Ȼ���ɿ���ؓ؟��v�O���O��朱�bus_for_each_dev������v���O��r����__driver_attach����ؓ؟���O������M���P���Ӷ˵�probe����ָ��Ȼ�����λ��{�������ӵ�probe����dm9000_probe���@���^����һ�����Ŀ�ܣ���ô���}�l����dm9000_probe�������У��҂����Ԍ�dm9000_probe���Mһ������ķ������������dump_stack()������
dump_stack()�����Č��F��ϵ�y�Y���o�����P�����Ľ�BARM�wϵ��dump_stack()�����Č��F��ԓ�������x��arch/arm/kernel/traps.c�ļ��У��{��dump_stack()��������Ҫ�����^�ļ����������ڃȺ˴��a�κεط�������ֱ��ʹ��ԓ������
�P�I�Ĵ�����B��
�Ĵ������x
r0-r3�����������������纯��A�{�ú���B�����A��Ҫ��B���f�������t�������ŵ��Ĵ���r0-r3�У����������������4���t��Ҫ���ú����ė����g��
r4-r11׃���Ĵ������ں����п����Á������R�r׃����
r9(SB)�o�B��ַ�Ĵ�����
r10(SL)�����Ĵ�����
r11(FP)��ָᘼĴ�����ͨ���Á��L������������ָ�ָ�����е�ij��λ�á�
r12(IP)�Ȳ��^���{�Õ���Ĵ�����
r13(SP)��ָᘼĴ������Á�ָ�����ė�픡�
r14(LR)朽ӼĴ�����ͨ���Á����溯���ķ��ص�ַ��
�Ⱥ��еĺ����� �Ⱥ��У�һ�������Ĵ��a���_ʼ��ָ���������ʽ:
mov ip, sp
stmfd sp!, {r0 - r3} (���x��)
stmfd sp!, {..., fp, ip, lr, pc}
……
�����Ѓɗlstmfd��������ָ����Կ�����һ�������ĺ������ė��ף��ߵ�ַ���ĽY�������ǹ̶��ģ����D��
�����҂��s�����{�õĺ����Q��callee���������{���ߺ����Q��caller������ ���M�к����{�õĻ��ݕr���Ⱥ��е�dump_stack()������Ҫ�����Lԇ��
1�������xȡϵ�y�е�FP�Ĵ�����ֵ���҂�֪����ָ���ָ������ij��λ�õģ�����ͨ�^FP��ֵ����ֱ���ҵ���ǰ�����ĺ������ĵ�ַ�� 2���õ���ǰ�����Ĵ��a�ε�ַ���@�������ף���鮔ǰ���ڈ��еĴ��a����ͨ�^PC�Ĵ����@�ã���̎�ں����Ĵ��a���С��ں������б�����һ��PC�Ĵ����Ă�ݣ�ͨ�^�@��PC�Ĵ�����ֵ���Զ�λ�������ĵ�һ�lָ�����������ڵ�ַ�� 3���õ���ǰ��������ڵ�ַ�Ⱥ��б��������к�����ַ�ͺ������Č����Pϵ�����Կ��Դ�ӡ����������ԔҊ��һƪ���ͣ��Ⱥ˷�̖���IJ����^�̣��� 4���ڮ�ǰ�����ĺ�������߀������caller�����Ď�ָᘣ�FP�Ĵ�����ֵ���������҂��Ϳ����ҵ�caller�����ĺ�������λ�á� 5���^�m����2-4����ֱ��ij�������ĺ������б���Ď�ָᘣ�FP�Ĵ�����ֵ����0��Ƿ��� �l�������{�Õr���������ʹ��a�ε��Pϵ���D��ʾ��
dump_stack()���� �����҂��́���һ��dump_stack()�����Č��F�� dump_stack()��Ҫ���{��������ĺ���
c_backtrace(fp, mode);
�ɂ������ĺ��x�飺 fp : current�M�̗���fp�Ĵ����� mode: ptrace �õ���PSRģʽ�����@���҂����P�ġ�dump_stack�����ֵ��0x10�� �@�ɂ������քe�xֵ�or0, r1�Ĵ������oc_backtrace()������ c_backtrace�������x���£�arch/arm/lib/backtrace.S����
@ ���x�ׂ��ֲ�׃��
#define frame r4
#define sv_fp r5
#define sv_pc r6
#define mask r7
#define offset r8
@ ��ǰ̎��dump_backtrace�����ė���
ENTRY(c_backtrace)
stmfd sp!, {r4 - r8, lr} @ ��r4-r8��lr���뗣�У��҂�Ҫʹ��r4-r8�����Ԃ��һ��ԭ����ֵ��spָ�������Ĕ���
movs frame, r0 @ frame=r0��r0�����ĵ�һ����������fp�Ĵ�����ֵ
beq no_frame @ ���frame��0���t�˳�
tst r1, #0x10 @ 26 or 32-bit mode? �Д�r1��bit4�Ƿ��0
moveq mask, #0xfc000003 @ mask for 26-bit ����ǣ���r1=0x10���tmask=0xfc000003����pc��ַֻ�е�26bit��Ч����ĩ��λ��0
movne mask, #0 @ mask for 32-bit ������ǣ���r1!=0x10���tmask=0
@ ������һ�κ�ԓ�����o�P�Ĵ��a���Á�Ӌ��pc�Aȡָ��ƫ�ƣ�һ��pc��ָ���ɗlָ�����offsetһ�����8
1: stmfd sp!, {pc} @ �惦pc��ֵ������,spָ��pc��
ldr r0, [sp], #4 @ r0=sp��ֵ�����������pc��ֵ����Ҫ���е�ָ���sp=sp+4��߀ԭsp
adr r1, 1b @ r1 = ��̖1�ĵ�ַ����ָ�� stmfd sp!, {pc} �ĵ�ַ
sub offset, r0, r1 @ offset=r0-r1����pc���Hָ���ָ����xȡpc��ָ��֮�g��ƫ��
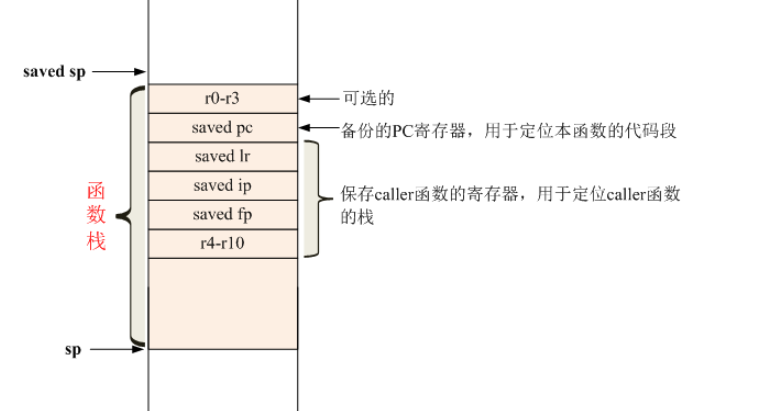
/*
* Stack frame layout:
* optionally saved caller registers (r4 - r10)
* saved fp
* saved sp
* saved lr
* frame => saved pc @ frame�������fp��ÿ��������fp��ָ���@��λ��
* optionally saved arguments (r0 - r3)
* saved sp => <next word>
*
* Functions start with the following code sequence:
* mov ip, sp
* stmfd sp!, {r0 - r3} (optional)
* corrected pc => stmfd sp!, {..., fp, ip, lr, pc} //��pc������ָ��
*/
@ ���������̣��_ʼ���Ҳ���ӡ�{���ߺ���
for_each_frame: tst frame, mask @ Check for address exceptions
bne no_frame
@ ��sv_pc�ҵ���pc�������Ǘlָ�����@�lָ���ڴ��a���е�λ���������ԣ������ڶ�λ������ڡ�
1001: ldr sv_pc, [frame, #0] @ �@ȡ������callee�����sv_pc����ָ��callee�Ĵ��a�ε�ij��λ��
1002: ldr sv_fp, [frame, #-12] @ get saved fp���@��fp����caller��fp��ָ��caller�ė���ij��λ��
sub sv_pc, sv_pc, offset @ sv_pc�pȥoffset���ҵ���pc�������Ǘlָ�������ע��ᵽ��corrected pc��
bic sv_pc, sv_pc, mask @ mask PC/LR for the mode ���sv_pc��mask��1��λ�����磬mask=0x4���t���sv_pc��bit2��
@ ��λ�����ĵ�һ�lָ���������ڵ�ַ
1003: ldr r2, [sv_pc, #-4] @ if stmfd sp!, {args} exists, ����ں������_ʼ������r0-r3
ldr r3, .Ldsi+4 @ adjust saved 'pc' back one. r3 = 0xe92d0000 >> 10
teq r3, r2, lsr #10 @ ���^stmfdָ��C���a�Ƿ���ͬ(���Pע�Ƿ�r0-r9)��Ŀ�����Д��Ƿ��stmfdָ��
subne r0, sv_pc, #4 @ allow for mov: ���sv_pcǰ��ֻ��mov ip, sp
subeq r0, sv_pc, #8 @ allow for mov + stmia: ���sv_pcǰ���Ѓɗlָ��
@ ���ˣ�r0��callee�����ĵ�һ�lָ��ĵ�ַ����callee��������ڵ�ַ
@ ��ӡr0��ַ�����ķ�̖�������odump_backtrace_entry����������
@ r0:������ڵ�ַ��
@ r1:����ֵ��caller�еĵ�ַ��
@ r2��callee��fp
ldr r1, [frame, #-4] @ get saved lr
mov r2, frame
bic r1, r1, mask @ mask PC/LR for the mode
bl dump_backtrace_entry
@ ��ӡ�����ڗ���ļĴ������@�������ݛ]�Pϵ�������в�̫�P��
ldr r1, [sv_pc, #-4] @ if stmfd sp!, {args} exists, sv_pcǰһ�lָ���Ƿ���stmfdָ��
ldr r3, .Ldsi+4
teq r3, r1, lsr #10
ldreq r0, [frame, #-8] @ get sp��frame-8ָ���IP�Ĵ���������mov ip, sp������caller��sp=ip
@ ����r0=caller�ė��ĵ͵�ַ��
subeq r0, r0, #4 @ point at the last arg. r0+4����callee�ė��ĸߵ�ַ��
@ ���څ����ĉ�������r3,r2,r1,r0�������@�플��H�������һ��������
bleq .Ldumpstm @ dump saved registers
@ ��ӡ�����ڗ���ļĴ������@�������ݛ]�Pϵ�������в�̫�P��
1004: ldr r1, [sv_pc, #0] @ if stmfd sp!, {..., fp, ip, lr, pc}
ldr r3, .Ldsi @ instruction exists, ���ָ���frameָ���ָ���stmfd sp!, {..., fp, ip, lr, pc}
teq r3, r1, lsr #10
subeq r0, frame, #16 @ ���^fp, ip, lr, pc�����ҵ������r4-r10
bleq .Ldumpstm @ dump saved registers����ӡ����r4-r10
@ �������ڮ�ǰ�������е�caller��fp���Ϸ��ԙz��
teq sv_fp, #0 @ zero saved fp means �Д�@ȡ��caller��fp��ֵ
beq no_frame @ no further frames ���caller fp=0���tֹͣѭ�h
@ ����frame׃��ָ��caller��������λ�ã�������ע��е�Stack frame layout
cmp sv_fp, frame @ sv_fp-frame
mov frame, sv_fp @ frame=sv_fp
bhi for_each_frame @ cmp�ĽY�������frame<sv_fp������ǰfpС��caller��fp���t�^�mѭ�h
@ �@�rframeָ��caller����fp�����ں����в�����fp��ֵ�������@��fp�϶���ָ��caller�����pc��λ�õġ�
1006: adr r0, .Lbad @ ��t�ʹ�ӡbad frame��ʾ
mov r1, frame
bl printk
no_frame: ldmfd sp!, {r4 - r8, pc}
ENDPROC(c_backtrace)
@ c_backtrace�����Y����
@ ������Ĵ��a�ŵ�__ex_table�������С�����1001b ... 1006b��ָ�����1001-1006��̖��
.section __ex_table,"a"
.align 3
.long 1001b, 1006b
.long 1002b, 1006b
.long 1003b, 1006b
.long 1004b, 1006b
.previous
#define instr r4
#define reg r5
#define stack r6
@ ��ӡ�Ĵ���ֵ
.Ldumpstm: stmfd sp!, {instr, reg, stack, r7, lr}
mov stack, r0
mov instr, r1
mov reg, #10
mov r7, #0
1: mov r3, #1
tst instr, r3, lsl reg
beq 2f
add r7, r7, #1
teq r7, #6
moveq r7, #1
moveq r1, #'\n'
movne r1, #' '
ldr r3, [stack], #-4
mov r2, reg
adr r0, .Lfp
bl printk
2: subs reg, reg, #1
bpl 1b
teq r7, #0
adrne r0, .Lcr
blne printk
ldmfd sp!, {instr, reg, stack, r7, pc}
.Lfp: .asciz "%cr%d:%08x"
.Lcr: .asciz "\n"
.Lbad: .asciz "Backtrace aborted due to bad frame pointer <%p>\n"
.align
.Ldsi:
@ �Á��Д��Ƿ���stmfd sp!ָ����҅�������fp, ip, lr, pc��������r10
.word 0xe92dd800 >> 10 @ stmfd sp!, {... fp, ip, lr, pc}
@ �Á��Д��Ƿ���stmfd sp!ָ����҅���������r10, fp, ip, lr, pc
.word 0xe92d0000 >> 10 @ stmfd sp!, {}
������https://blog.csdn.net/jasonchen_gbd/article/details/45585133




