 stm32���ھ��̌���-���F�������հl����
�r�g��2018-07-23 ��Դ��δ֪
stm32���ھ��̌���-���F�������հl����
�r�g��2018-07-23 ��Դ��δ֪
������USART(ͨ��ͬ��/�����հl��)���Q�����H�ϣ����п�������ֻ��USART��߀����IIC��SPI��CAN��K�����ο�����USB��485�ȵȿ�����ֻ�����UART�õ��^�࣬���T�Ͻ���“����”��
���ȁ�����UART��ͨ��ģ�ͣ�
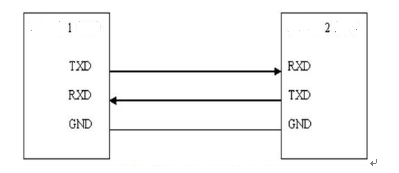
�O��1�c�O��2�M��ͨ��
TXD���l�Ͷˣ�ؓ؟�l�͔���
RXD�����նˣ�ؓ؟���Ք���
GND���ؾ������C�O��1�c�O��2����ͬ�ą���늉������Cͨ�ŵ������M�С�
��ģ�����҂����Կ���UART(USART��ͬ��ͨ�ţ����@��ģ�͵Ļ��A�϶�һ�lʼ�K���ƿ�������������)��һ��������ȫ�p��������ͨ�š���Ȼ�Ǯ����ģ���ô����Ҫ�����O��1�c�O��2�����հl���ٶ�һ���ԣ�Ҳ���ǃ��O��Ҫ����ͬ�IJ�����(bit/sһ����܂���)����tͨ�ŕ����F������ݔ�e�`��
�F���҂�����stm32�Ĵ���1�����F�cPC���ϵĴ��������Fͨ�š����Ȳ鿴���ڵ����_���鿴оƬ�փ��ϸ����_���õď��ù��ܵȡ�
�����nj��F���a����Ҫ�nj��FUart1�������հl��
void USART1_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
//���Õr�
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
/* USART1 GPIO config */
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* USART1 mode config */
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
//ʹ�ܴ����Д�
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
//��հl����ɘ�־λ
USART_ClearFlag(USART1,USART_FLAG_TC);
//ʹ�ܴ���
USART_Cmd(USART1, ENABLE);
}
//���xprintf�����ӿ�(printf�ض���)
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
return (ch);
}
//���xscanf�����ӿ�(scanf�ض���)
int fgetc(FILE *f)
{
while (USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET);
return (int)USART_ReceiveData(USART1);
}
//�l���ַ�
char usart1_putc(char ch)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) != SET);
return (ch);
}
//�l���ַ���
int usart1_putstr(unsigned char* buff,int len)
{
int i = 0;
for(i = 0;i < len;i++)
{
usart1_putc(buff[i]);
}
return len;
}
//�����ַ�
char usart1_getc(void)
{
char temp = 0;
while(USART_GetFlagStatus(USART1,USART_FLAG_RXNE)!= SET);
temp = USART_ReceiveData(USART1);
return temp;
}
//�����ַ���
int usart1_getstr(unsigned char* buff,int len)
{
int i = 0;
for(i = 0;i < len;i++)
{
buff[i] = usart1_getc();
}
return len;
}
���ú�֮���@Щ�����ŵ��^�ļ������������ŵ���������ȥ��ʼ�����{�ã��Ϳ��Ԍ��F�������հl���ܡ�




