 MPPT�������̼��㷨��Ӳ�����x��
�r�g��2018-04-24 ��Դ��δ֪
MPPT�������̼��㷨��Ӳ�����x��
�r�g��2018-04-24 ��Դ��δ֪
�ڹ������ϵ�y(t��ng)�У�������ա��ضȵȗl����׃�������늳ص�ݔ������Ҳ���ڲ���׃���ģ��鱣�Cʹ�ù��늳ص�ݔ�����ʱ���������c����Ҫ�{�����늳�ݔ��늉�(���Տ��Ȱl(f��)��׃���r����·���׃�����_·늉���Ӱ�С;�h(hu��n)���ضȰl(f��)��׃���r����·�����Ӱ�С���_·늉�׃����)�����⣬���늳ص�ݔ��늉������Ҳ��ؓ�d�кܴ��Pϵ��ؓ�d��ݔ��늉���ݔ�����С;ؓ�dС��ݔ��늉�С��ݔ��������늳ص�MPP�е�늉���ָ���늳ص�ݔ��늉���
MPPT�㷨�x��
Ŀǰ��MPPT�㷨���_·늉�����(�x��)����·�������(�x��)���^���{��(ji��)(�ھ�)���O��ۙ���Ʒ�(�ھ�)��
�_·늉����ʷ�——�@�����f�Ƿdz�����Ҳ�ஔ���ϵķ����ˣ�����“�̶�늉���”�������f���㷨���������늉����_·늉��ľ����Pϵʽ ��ϵ��(sh��) ȡֵ���OӋ���Q����һ�����0.71��0.78֮�g�������(sh��)�O����0.76��MPPT��ۙ�r�������_·DC�ˁ�y���_·늉���Ȼ��ͨ�^�㷨��Ӌ�������늉����Ҷ�λ������c��MPPT��������ԓ�����cһ�Εr�g��Ȼ���؏��_·�y�㲢�����¶�λ���̶�늉��������(y��u)�c�����������˲��ґ��ú��Ρ��෴��ȱ�cҲʮ�����@�����_ֵ��ۙЧ���^�͡��M�̶ܹ�늉������Q֮��“ۙ”�㷨����������Ȼ������������ѭ�h(hu��n)�е�һ��Ӌ���O��ֵ���Ǽ��rֵۙ����Σ��˷�����ȫ�҆μ���ه�ڽM�����_·늉�ֵ���ŗ��ˌ��ڹ��������ۙ�����ֲ��Ӱ���F(xi��n)����Еr�����H������c��MPPT�O�������c�͕����F(xi��n)�ஔ���ƫ�ƫ���ȡ�Q���Ӱ���w�̶ȡ����ÿ�ΙC���M���_·늉��y���r��̫���ϵ�y(t��ng)�ǟo��ݔ�����ʵģ��S���r�g�ʹΔ�(sh��)��Ӌ���㷨�����һ������������ʧ�����w���f�����u��
��·������ʷ�——�̶�늉������㷨���ƣ����Ա����� �� ��һ��׃��ϵ��(sh��)��ͨ��׃��������0.78��0.92���̶�늉�����ͬ���ǣ���·������ʷ�Ҫ�����D�Q������һ�����l�_�P��y����·��������^���]�����ڽM����DC link�����֮�g���bһ��FET(field-effect transistor)����������ܵ����Տ��ȵ�Ӱ푷dz���ͨ���C��߀��Ҫһ��DSP(digital signal processor)�����CIV������ȫ����͔�(sh��)���Ĝʴ_�ȡ��@Ҳ��·������ʷ��OӋ���ӏ��s���y�ԑ��á����u��
�^���{��(ji��)��——վ�ھ��˼��^�l(f��)չ�������㷨��Ҳ���?Ŀǰ��P&O��Ȼ���������������������׃����Ҳ����V���ı����õ��㷨���]��֮һ�������ESC��P&O�����ڸ��̵ĕr�g��ۙ�r�|������ą^(q��)�������ؔ�(sh��)�����@�Mһ�������P&O��ۙЧ�ʺ͜ʴ_�ʡ��������ڶ̕r�g�ȿ���̎�������Ĕ�(sh��)�����@Ҳһ���̶ȵ�����ͻ׃���Տ��Ȍ���ۙ���_�ȵ�Ӱ푡�ȱ�c��Ԓ������������ķ����^��һ���̶ȵČ���ݔ������ȱ����(w��n)���ԣ����Ƕ��ӳ̶Ȼ�������±4%�ԃȡ�������߀Ҫ�o��32��ٝ!P&O߀��һ�����ð汾��߀��“��ɽ”߉�����Dz�����“ԇ�e”��(trial and error)��̎������������һ��ۙ�c���Ƅ�څ�ݣ����^���ʵ���������ؓ������������ʳ��m(x��)���ӣ�̎���������^�m(x��)ͬ�����Ƅ�ۙ�c����ͣ���^ֱ�������_����ֵ��
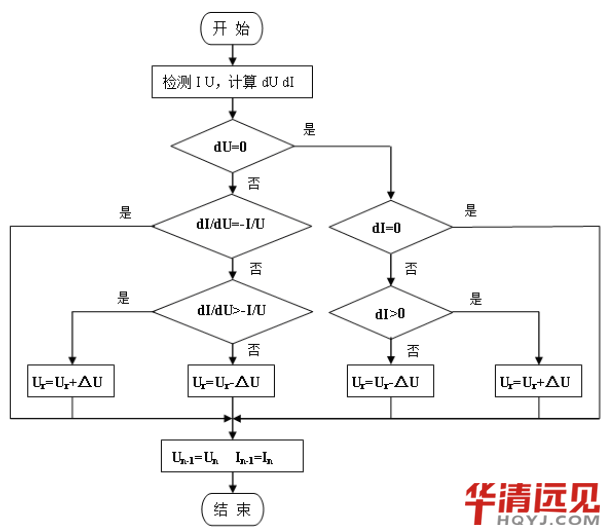
�O��ۙ���Ʒ�——ԓ�㷨��һ�������19���o20�����Ҳ��Ŀǰȫ�������е�“�^�y�{��(ji��)��”(Perturb and Observe)��ǰ�����㷨�Ą�(chu��ng)���c��������������P-V�����С�̎��������늉���������p�������^�����Ĺ������p�����M���_��ۙ�����c���Ƅӷ����w�ж�����Ո���ՈD����һĿ��Ȼ��
ESC�㷨�ľ�ɹ��������֮ǰ�Ĺ̶�늉���,ͨ�^�u�M����������“��ɽ��”�ĸ���M���_���˄ӑB(t��i)ۙ���㷨��ESC�O����،���MPPT����DC��ݔ�������IJ����@���������ۙЧ�ʡ�����ESC���ں��MPPT�㷨��Ӱ����h���������Ķ̰�Ҳһ�����^����������“����”����һ��Ʒ�Ƶ���׃����ESC���ڶ�Ȼ׃���Ĺ��շ������ң��e��ͨ�����ӣ�MPPT����ע�ı��^�����ʺ�늉���׃����“�ţ������Ƅӵ�늉�ͬ�����S�����ʵ����ӣ����@������c߀������(��߅)�������^�m(x��)�����Ƅ�”���˕r�ƌӓ�ס��ꖹ⣬����Ӱ���ݔ���ֱ�����ʣ�ʹ֮���½���“����!�����Ƅӵ�늉���Ȼ���¹��ʜpС��!�ҿ϶��e�^��������c������^!”���ǣ�ۙ�c���x���Ěw��Խ��Խ�h�ĵط��hȥ���������ڌ����ģ�M�yԇ�r���H�ۿ�������_��70%���ҵ�ƫ�����ESC�@�Nһ��(first stage)ۙ���OӋ����@�N�F(xi��n)�o�⡣�������p��������������Ӱ��Լ����(chu��ng)�£�߀�Ǻ��u!
�C�Ͽ��]��MPPT���㷨���ØO��ۙ���Ʒ����M��ܛ�����F(xi��n)�����ɼ�PN��늉�������PN�ȵ������(sh��)����Ӌ�� �� �� ���Д� �c ���Pϵ�� ���� ���˕r���� �pСPN�ȵ�Ŀ��늉�;�� С�� ���˕r���� ����PN�ȵ�Ŀ��늉���
MPPTӲ���x��
MPPT�Č��F(xi��n)��ͨ�^�{��(ji��)���늳�ݔ��늉��팍�F(xi��n)�ģ������늳�ݔ��늉�ֱ���B�ӵ�DC/AC��PN�ȣ���ô���늳�ݔ��늉����Ӿ͕�ֱ��Ӱ�PN��늉���������ڹ��늳غ�DC/AC֮�g��һ�����g�h(hu��n)��(ji��)��ͨ�^�@�����g�h(hu��n)��(ji��)���{��ݔ��늉�������ݔ��늉���(w��n)�������ӻ�pСݔ��������@������һ����BUCK��BOOST��BUCK-BOOST��CUK�·���_�P�·�����x��BUCK�·���B�m(x��)��ؓ�d��늡��g�ӏ��Դȡ�;BOOST�·�r�g����ؓ�d��늡��B�m(x��)���Դȡ늣��鱣�C���늳ذ�İl(f��)�Ч�ʵõ��^��ʹ�ã�һ���x��BOOST�·�팍�F(xi��n)MPPT��
�x��BOOST�·�팍�F(xi��n)MPPT�㷨����Y���ؓ����D��
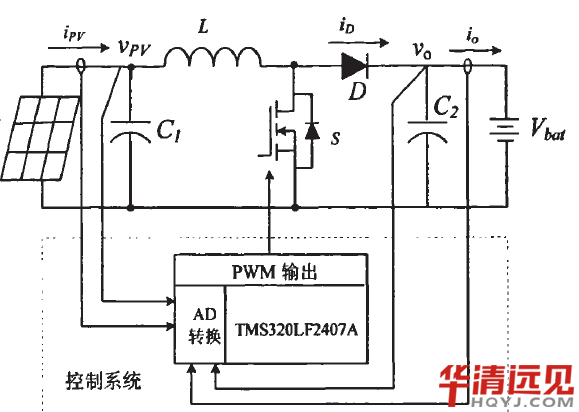
���]�ɱ����}���ټ��Ϲ��늳�ݔ��������������c������ݔ��늉���e���Ǻܴ�MPPT��ʹ��DC/DC�·�팍�F(xi��n)���ڬF(xi��n)�е�DC/ACƽ�_���M�Ќ��F(xi��n)��
MPPT���F(xi��n)
׃�����Ĺ������̞飺
����——�A���——PN��̧��——������늳�——ݔ��(MPPT)��
���Դ_����MPPT����������늉��h(hu��n)�����ã���������׃�����M�빤����B(t��i)���_ʼ������
���ìF(xi��n)�е�DC/ACƽ�_�팍�F(xi��n)MPPT�����ڃɂ����}�����Ʋ��L(�r�g�g��)���}���_�Ӳ��L ���}���Дྫ�Ȇ��}��
���Ʋ��L���}——PN��늉���MPPT�^���Е��a��һ���IJ��ӣ�����錦�ڹ��늳��f(�Y������ɈD)����������c������늉����¶���һ������ķ����ȣ����Ҷ��ӽ��_·늉������ԣ�������DC/AC�ό��F(xi��n)MPPT��Ҫ���]���L�r�g��PN��Ŀ��늉��M��һ�θ��¡�ĿǰState Manage����(sh��)��0.1ms�M��һ�Σ����Կ��]MPPT�Ŀ��Ʋ��L��0.2~0.5ms�����L������0.3ms��
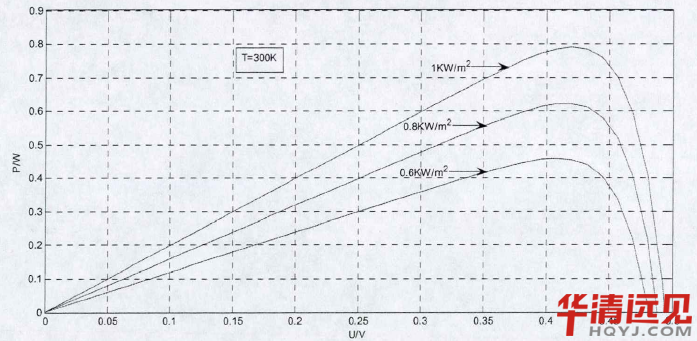
��ͬ���ա���ͬ�ض�
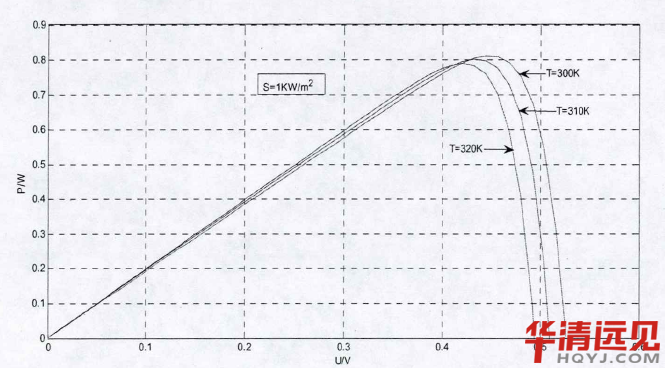
��ͬ�ضȣ���ͬ����
�_�Ӳ��L���}——���]��׃�����M�빤����B(t��i)����PN��늉����^��(w��n)����ֵ����ʹ���Տ��ȡ��h(hu��n)���ضȰl(f��)��׃�������늳ص�������c늉���׃�ӷ��������ܴ�����ɼ�����PN��늉����늳�ݔ���������Ӌ���ǰһ�r�̵Ĺ��ʲ�ֵ ������늌��������M���Д࣬Ȼ����Ŀ�˸�ۙ늉������ӻ�pСһ���IJ��L ������ڹ��늳��_ʼ������PN��늉����Ǐ�0�_ʼ�ģ������ڹ��늳�������c����늉����������� ��ֵ�����^С��Kֵ���O��ͨ�^�{ԇ����@�ã�K������5��
�Дྫ�Ȇ��}——�Ɍ��{���Ĺ������̈D(�D)����֪�����������д��� �� �c0���Pϵ���Д࣬�����п��Ǖ������`����ҙz�y��Ҳ�����ڣ������0���Д���ֵ�����]���H�����е��`�����أ���һ��С���yֵ�����0���yֵ������0.1V��0.1A��
MPPT�㷨C���F(xi��n)
#include "16F877.h"
#device ADC = 8 // һ��8λ�Ĵ���ADCģʽ
#fuses HS, NOWDT, PUT, NOPROTECT, BROWNOUT, NODEBUG, NOLVP // High-Speed 20MHz, No Watchdog, No Protection, Brownout Protection,
#use delay(clock=20000000) // 20MHz Crystal
//int is defined as 8-bit unsigned integer using CCS compiler
void main (void)
{
signed int direction;
int delta;
int pwm;
int upperbound;
int lowerbound;
float power;
float powerold;
float voltage;
float voltagedrop;
float voltagedifference;
float currentma;
float measuredvoltage;
float measuredvoltagedrop;
direction = 1; // Set initial direction to positive
delta = 1; // Amount by which to adjust the PWM - 7-bit resolution so duty step of 2%
pwm = 26; // Initial position of the PWM - 50% Duty Cycle with 7-bit resolution.
upperbound = 49; // Upper bound of the PWM %
lowerbound = 1; // Lower bound of the PWM %
power = 0; // Initial Value of Power
setup_adc(ADC_CLOCK_DIV_32); // ADC clock
setup_adc_ports(ALL_ANALOG); // Set all inputs to analog
output_low(PIN_C1); // Set CCP1 output low
setup_ccp1(ccp_pwm); // setup pin CCP1 (RC2) to do PWM
setup_timer_2(T2_DIV_BY_1,12,1); // 384.615kHz
while (1)
{
//delay_ms(1000) // Wait 1 Second
set_adc_channel(0); // Select RA0
//delay_ms(20); // Wait to Read ADC
measuredvoltage = read_adc(); // Read the voltage input from ADC channel 0
set_adc_channel(1); // Select RA1
//delay_ms(20); // Wait to Read ADC
measuredvoltagedrop = read_adc(); // Read the Voltage dropped across the R from ADC channel 1
voltage = measuredvoltage/51; // Measured Voltage is 51 steps per Volt at a Reference Voltage of 5V
voltagedrop = measuredvoltagedrop/51;
voltagedifference = voltage - voltagedrop;
currentma = voltagedifference; // Calculating Current using 1K Resistance
powerold = power; // Calculate the Power from the inputs
power = voltage * currentma;
pwm = pwm + direction*delta; // Adjust Pulse Width Modulation Value by Delta value
if (power < powerold) // If at top of curve, change direction
{
direction = -direction;
continue;
}
if (pwm > upperbound) // If at maximum PWM, Stop here
{
pwm = upperbound;
continue;
}
if (pwm < lowerbound) // If at mi
nimum PWM, Stop here
{
pwm = lowerbound;
continue;
}
set_pwm1_duty(pwm); // Set PWM Mark-Space Radio to approx 50%
}
}

 �A���hҊ90+�Ŀ�@����������2021���
f(xi��)ͬ�����Ŀ���A���hҊ�s�@2021�vӍ��������ȿڱ�Ӱ����I(y��)����Ʒ�A���hҊ��������2021����h���k��У��Ϣ�W�ƺ���(li��n)����ůͬ�й���(chu��ng)�ѿ� 2019�A���hҊ��������������ع�������УAI�˹����܌W�ƽ��O �A���hҊ�˹������Y���A���hҊ���������Ĵ�ʡ��(li��n)�W������s�@��(y��u)����I(y��)����
�A���hҊ90+�Ŀ�@����������2021���
f(xi��)ͬ�����Ŀ���A���hҊ�s�@2021�vӍ��������ȿڱ�Ӱ����I(y��)����Ʒ�A���hҊ��������2021����h���k��У��Ϣ�W�ƺ���(li��n)����ůͬ�й���(chu��ng)�ѿ� 2019�A���hҊ��������������ع�������УAI�˹����܌W�ƽ��O �A���hҊ�˹������Y���A���hҊ���������Ĵ�ʡ��(li��n)�W������s�@��(y��u)����I(y��)����

